 Subscribe
SubscribeArchives
0
Hard disk adalah perangkat penyimpanan sekunder yang digunakan dalam sistem komputer. Biasanya memori utama yang digunakan untuk boot up komputer. Tapi hard disk drive yang diperlukan dalam sistem komputer karena kebutuhan untuk menyimpan sistem operasi yang digunakan untuk menyimpan informasi dari perangkat dan manajemen data pengguna.
Pengelolaan perangkat IO yang merupakan perangkat Input Output, seperti printer dan peripheral lain seperti keyboard dan etc, semua memerlukan penggunaan sistem operasi. Oleh karena itu informasi dari semua perangkat tersebut dan pengelolaan sistem ini dilakukan oleh sistem operasi. Sistem operasi bekerja sebagai penerjemah antara mesin dan pengguna.
Sistem operasi adalah suatu keharusan bagi berfungsinya komputer. Komputer adalah perangkat yang perlu diberi makan dengan instruksi yang harus dilaksanakan dan dijalankan.Oleh karena itu perlu ada seorang penerjemah yang akan melaksanakan konversi dari bahasa tingkat tinggi dari pengguna untuk bahasa tingkat rendah dari mesin komputer.
Drive hard disk sebagai memori sekunder Oleh karena itu diperlukan untuk tujuan menginstal sistem operasi. Jika tidak ada sistem operasi maka muncul pertanyaan mana untuk menginstal sistem operasi. Sistem operasi jelas tidak dapat diinstal di memori utama tetapi yang besar yang mungkin. Memori utama adalah juga memori volatile yang tidak dapat digunakan untuk penyimpanan permanen dari file sistem dari sistem operasi. Sistem operasi membutuhkan media penyimpanan file permanen seperti hard disk.
Lebih dari manajemen hard disk adalah bagian penting dari menjaga komputer, karena memerlukan suatu manajemen yang efisien dari data atau informasi pengguna. Informasi tentang Master Boot Record disimpan dalam hard disk. Ini adalah informasi yang diperlukan selama start up komputer. Sistem komputer membutuhkan informasi ini untuk memuat sistem operasi.
Manajemen file dan manajemen sumber daya juga merupakan bagian dari manajemen hard disk. Pengelolaan hard disk memerlukan pengetahuan efisien dari sistem operasi dan sumber daya dan metode tentang bagaimana sumber daya tersebut dapat digunakan dalam rangka mencapai manfaat maksimal.Sistem operasi berisi sumber daya dan alat-alat yang digunakan untuk mengelola file dalam sistem operasi. Partisi dan instalasi sistem operasi itu sendiri dapat dianggap sebagai manajemen hard disk.
Pengelolaan hard disk juga melibatkan format drive hard disk dan untuk memeriksa integritas dari sistem file. Cek redundansi data juga dapat dilakukan untuk konsistensi dari hard disk drive. Pengelolaan hard disk drive juga penting dalam kasus jaringan di mana terdapat banyak hard disk drive untuk dikelola.
Mengelola hard disk tunggal dalam sebuah sistem operasi single user cukup mudah dibandingkan dengan pengelolaan drive hard disk dalam sistem operasi multi user mana terdapat lebih dari satu pengguna. Hal ini tidak banyak yang mudah karena pengguna juga diharuskan untuk dikelola.
Data Recovery Software - RAID Recovery Data Recovery Software - Pemulihan RAID
http://www.harddiskhome.com/hard-disk-management.html
Free Template Blogger collection template Hot Deals SEO
Management Hard disk
Selasa, 01 November 2011
Hard disk adalah perangkat penyimpanan sekunder yang digunakan dalam sistem komputer. Biasanya memori utama yang digunakan untuk boot up komputer. Tapi hard disk drive yang diperlukan dalam sistem komputer karena kebutuhan untuk menyimpan sistem operasi yang digunakan untuk menyimpan informasi dari perangkat dan manajemen data pengguna.
Pengelolaan perangkat IO yang merupakan perangkat Input Output, seperti printer dan peripheral lain seperti keyboard dan etc, semua memerlukan penggunaan sistem operasi. Oleh karena itu informasi dari semua perangkat tersebut dan pengelolaan sistem ini dilakukan oleh sistem operasi. Sistem operasi bekerja sebagai penerjemah antara mesin dan pengguna.
Sistem operasi adalah suatu keharusan bagi berfungsinya komputer. Komputer adalah perangkat yang perlu diberi makan dengan instruksi yang harus dilaksanakan dan dijalankan.Oleh karena itu perlu ada seorang penerjemah yang akan melaksanakan konversi dari bahasa tingkat tinggi dari pengguna untuk bahasa tingkat rendah dari mesin komputer.
Drive hard disk sebagai memori sekunder Oleh karena itu diperlukan untuk tujuan menginstal sistem operasi. Jika tidak ada sistem operasi maka muncul pertanyaan mana untuk menginstal sistem operasi. Sistem operasi jelas tidak dapat diinstal di memori utama tetapi yang besar yang mungkin. Memori utama adalah juga memori volatile yang tidak dapat digunakan untuk penyimpanan permanen dari file sistem dari sistem operasi. Sistem operasi membutuhkan media penyimpanan file permanen seperti hard disk.
Lebih dari manajemen hard disk adalah bagian penting dari menjaga komputer, karena memerlukan suatu manajemen yang efisien dari data atau informasi pengguna. Informasi tentang Master Boot Record disimpan dalam hard disk. Ini adalah informasi yang diperlukan selama start up komputer. Sistem komputer membutuhkan informasi ini untuk memuat sistem operasi.
Manajemen file dan manajemen sumber daya juga merupakan bagian dari manajemen hard disk. Pengelolaan hard disk memerlukan pengetahuan efisien dari sistem operasi dan sumber daya dan metode tentang bagaimana sumber daya tersebut dapat digunakan dalam rangka mencapai manfaat maksimal.Sistem operasi berisi sumber daya dan alat-alat yang digunakan untuk mengelola file dalam sistem operasi. Partisi dan instalasi sistem operasi itu sendiri dapat dianggap sebagai manajemen hard disk.
Pengelolaan hard disk juga melibatkan format drive hard disk dan untuk memeriksa integritas dari sistem file. Cek redundansi data juga dapat dilakukan untuk konsistensi dari hard disk drive. Pengelolaan hard disk drive juga penting dalam kasus jaringan di mana terdapat banyak hard disk drive untuk dikelola.
Mengelola hard disk tunggal dalam sebuah sistem operasi single user cukup mudah dibandingkan dengan pengelolaan drive hard disk dalam sistem operasi multi user mana terdapat lebih dari satu pengguna. Hal ini tidak banyak yang mudah karena pengguna juga diharuskan untuk dikelola.
Data Recovery Software - RAID Recovery Data Recovery Software - Pemulihan RAID
http://www.harddiskhome.com/hard-disk-management.html
Free Template Blogger collection template Hot Deals SEO
0
Ada tiga metode dalam penempatan blok yaitu:
Free Template Blogger collection template Hot Deals SEO
Memory Cache
Minggu, 23 Oktober 2011
Ada tiga metode dalam penempatan blok yaitu:
- Direct Mapped Cache
- Fully Associative Mapped Cache
- Set Associative Mapped Cache
a. Direct Mapped Cache
Jika setiap blok dari memori utama hanya memiliki satu tempat dapat muncul dalam cache, cache dikatakan Direct Mapped. Untuk menentukan urutan baris Cache blok memori utama dipetakan kita dapat menggunakan rumus di bawah ini:
Cache Line Number = (Main Memory Block Number) MOD (Number of Cache Lines)
Cache Line Number = (Main Memory Block Number) MOD (Number of Cache Lines)
Mari kita asumsikan kita memiliki ukuran Main Memory 4GB (2 32), dengan setiap byte secara langsung dialamatkan oleh sebuah alamat 32-bit. Kami akan membagi memori menjadi blok utama dari masing-masing 32 byte (2 5). Jadi ada 128M (yaitu 2 32 / 2 5 = 2 27) blok dalam memori utama.
Memori Cache memiliki 512KB (yaitu 2 19), dibagi menjadi blok dari masing-masing 32 byte (2 5). Jadi ada 16K (yaitu 2 19 / 2 5 = 2 14) blok juga dikenal sebagai slot Cache atau garis Cache di memori cache. Hal ini jelas dari nomor di atas bahwa ada blok memori lebih utama dari slot Cache.
Satu set 8k (yaitu 2 27 / 2 14 = 2 13) blok memori utama akan dipetakan ke slot cache tunggal. Dalam rangka untuk melacak mana dari 2 13 blok memori mungkin Utama di setiap slot Cache, lapangan tag 13-bit ditambahkan ke setiap slot Cache yang memegang sebuah identifier dalam berkisar dari 0 sampai 13-1 Februari.
Semua tag yang disimpan dalam memori tag khusus di mana mereka dapat dicari secara paralel. Setiap kali blok baru disimpan dalam cache, tag yang disimpan dalam lokasi memori yang sesuai tag.
Ketika program pertama kali dimuat ke memori utama, cache di-clear, sehingga sementara program adalah melaksanakan, sedikit yang valid diperlukan untuk menunjukkan apakah atau tidak slot memegang blok yang dimiliki oleh program yang sedang dieksekusi. Ada juga dirty bit yang melacak apakah atau tidak blok telah dimodifikasi ketika sedang dalam cache. Sebuah slot yang dimodifikasi harus ditulis kembali ke memori utama sebelum slot digunakan kembali untuk blok lain. Ketika program ini awalnya dimuat ke memori, bit yang valid semua set ke 0. Instruksi pertama yang dieksekusi dalam program karena itu akan menyebabkan kehilangan, karena tidak ada program ini di cache pada saat ini. Blok yang menyebabkan kehilangan terletak di memori utama dan dimuat ke cache.
Skema ini disebut “direct mapping” karena setiap slot cache sesuai dengan set eksplisit blok memori utama. Untuk cache dipetakan langsung, setiap blok memori utama dapat dipetakan hanya satu slot, tetapi masing-masing slot dapat menerima lebih dari satu blok.
Alamat memori 32-bit utama dipartisi menjadi bidang tag 13-bit, diikuti oleh medan slot 14-bit, diikuti dengan bidang 5-bit kata. Ketika referensi dibuat untuk sebuah alamat memori utama, slot mengidentifikasi bidang di mana dari 214 slot cache blok akan ditemukan jika berada dalam cache.
Jika bit valid adalah 1, maka field tag dari alamat direferensikan dibandingkan dengan bidang tag slot cache. Jika field tag adalah sama, maka kata tersebut diambil dari posisi di slot yang ditentukan oleh medan kata. Jika bit valid adalah 1 tetapi ladang tag tidak sama, maka slot ditulis kembali ke memori utama jika sedikit kotor diatur, dan blok memori yang sesuai utama kemudian membaca ke dalam slot. Untuk program yang baru saja dimulai eksekusi, bit valid akan 0, dan blok hanya ditulis untuk slot. Bit berlaku untuk blok ini kemudian di set ke 1, dan program resume eksekusi.
b. Fully Associative Mapped Cache
Jika sebuah blok memori utama dapat ditempatkan dalam salah satu slot cache, maka cache dikatakan fully associative mapped cache.
Diasumsikan kita memiliki ukuran Main Memory 4GB (2 32), dengan setiap byte secara langsung dialamatkan oleh sebuah alamat 32-bit. Kami akan membagi memori menjadi blok utama dari masing-masing 32 byte (2 5). Jadi ada 128M (yaitu 2 32 / 2 5 = 2 27) blok dalam memori utama.
Memori Cache memiliki 512KB (yaitu 2 19), dibagi menjadi blok dari masing-masing 32 byte (2 5). Jadi ada 16K (yaitu 2 19 / 2 5 = 2 14) blok juga dikenal sebagai slot Cache atau garis Cache di memori cache. Hal ini jelas dari nomor di atas bahwa ada blok memori lebih utama dari slot Cache.
Dalam fully associative mapped cache salah satu dari 128M (yaitu 2 27) blok memori utama dapat dipetakan ke salah satu slot Cache tunggal. Untuk melacak yang salah satu dari 2 27 blok yang mungkin adalah di setiap slot, lapangan 27-bit tag ditambahkan ke setiap slot yang memegang sebuah identifier dalam rentang dari 0 sampai 27-1 Februari. Bidang tag yang paling signifikan 27 bit dari alamat memori 32-bit disajikan untuk cache.
Dalam fully associative mapped cache, setiap blok memori utama dapat dipetakan ke slot apapun. Mapping dari blok memori utama untuk slot cache dilakukan oleh partisi alamat ke dalam kolom untuk tag dan kata (juga dikenal sebagai bidang “byte“).
Ketika referensi dibuat untuk sebuah alamat memori utama, menyadap perangkat keras cache referensi dan mencari memori tag cache untuk melihat apakah blok yang diminta dalam cache. Untuk masing-masing slot, jika bit berlaku adalah 1, maka field tag dari alamat direferensikan dibandingkan dengan bidang tag slot. Semua tag yang dicari secara paralel, dengan menggunakan memori asosiatif. Jika ada tag dalam memori tag cache sesuai bidang tag referensi memori, maka kata tersebut diambil dari posisi di slot yang ditentukan oleh medan kata. Jika kata yang direferensikan tidak ditemukan dalam cache, maka blok memori utama yang berisi kata tersebut dibawa ke dalam cache dan kata dirujuk kemudian diambil dari cache. Tag, bidang yang valid, dan kotor diperbarui, dan program resume eksekusi.
Fully associative mapped cache memiliki keuntungan menempatkan setiap blok memori utama ke baris cache manapun. Ini berarti bahwa terlepas dari bagaimana tidak teratur data dan referensi program, jika slot yang tersedia untuk blok, dapat disimpan dalam cache. Hal ini menyebabkan overhead yang cukup besar dalam perangkat keras yang diperlukan untuk cache bookkeeping.
Meskipun skema pemetaan cukup kuat untuk memenuhi berbagai macam situasi akses memori, ada dua masalah pelaksanaan yang membatasi kinerja.
- Proses memutuskan yang slot harus dibebaskan ketika sebuah blok baru dibawa ke dalam cache dapat menjadi kompleks. Proses ini memerlukan sejumlah besar hardware dan memperkenalkan keterlambatan dalam mengakses memori.
- Ketika cache dicari, bidang tag dari alamat yang direferensikan harus dibandingkan dengan semua bidang 2 14 tag dalam cache.
c. Set Associative Mapped Cache
Skema pemetaan asosiatif set menggabungkan kesederhanaan direct mapping dengan fleksibilitas fully associative mapped . Hal ini lebih praktis daripada fully associative mapped karena bagian asosiatif terbatas hanya beberapa slot yang membentuk set.
Dalam mekanisme pemetaan, memori cache dibagi menjadi set ‘v’, masing-masing terdiri dari baris cache ‘n’. Sebuah blok dari memori utama pertama dipetakan ke satu set cache tertentu, dan kemudian dapat ditempatkan di manapun dalam set yang. Jenis pemetaan memiliki rasio yang sangat efisien antara implementasi dan efisiensi.
Cache set number = (Main memory block number) MOD (Number of sets in the cache memory)
Cache set number = (Main memory block number) MOD (Number of sets in the cache memory)
Jika ada cache ‘n’ baris dalam satu set, penempatan cache disebut n-way set associative contohnya jika ada dua blok atau baris cache per set, maka itu adalah 2-way set associative cache dan empat blok atau cache garis per set, maka itu adalah 4-way set associative cache mapping.
Misalnya diasumsikan kita memiliki ukuran Main Memory 4GB (2 32), dengan setiap byte secara langsung dialamatkan oleh sebuah alamat 32-bit. Kami akan membagi memori menjadi blok utama dari masing-masing 32 byte (2 5). Jadi ada 128M (yaitu 2 32 / 2 5 = 2 27) blok dalam memori utama.
Memori Cache memiliki 512KB (yaitu 2 19), dibagi menjadi blok dari masing-masing 32 byte (2 5). Jadi ada 16K (yaitu 2 19 / 2 5 = 2 14) blok juga dikenal sebagai slot Cache atau Line Cache di memori cache. Hal ini jelas dari nomor di atas bahwa ada blok memori lebih utama dari slot Cache.
Misalnya 2-way set associative cache mapping yaitu baris cache 2 per set. Kami akan membagi baris cache 16K ke set 2 dan karenanya ada 8K (2 14 / 2 = 2 13) set dalam memori cache.
Cache Size = (Number of Sets) * (Size of each set) * (Cache line size)
Cache Size = (Number of Sets) * (Size of each set) * (Cache line size)
Jadi, bahkan dengan menggunakan rumus di atas kita dapat mengetahui jumlah set dalam yaitu cache memory.
2 19 = (Jumlah Set) * 2 * 2 5
Jumlah Set = 2 19 / (2 * 2 5) = 2 13
Ketika alamat dipetakan untuk mengatur, skema pemetaan langsung digunakan, dan kemudian pemetaan asosiatif digunakan dalam set.
Format untuk alamat memiliki 13 bit di bidang yang ditetapkan, yang mengidentifikasi set di mana kata ditujukan akan ditemukan jika berada dalam cache. Ada lima bit untuk bidang kata seperti sebelumnya dan ada 14-bit tag bidang yang bersama-sama membentuk 32 bit sisanya dari alamat.
Free Template Blogger collection template Hot Deals SEO
0
Eksekusi spekulatif dalam sistem komputer adalah melakukan pekerjaan, yang hasilnya mungkin tidak diperlukan. Teknik optimasi kinerja digunakan dalam prosesor pipelined dan systems.School lainnya.
MAIN IDEA ~Eksekusi spekulatif adalah optimasi kinerja. Ide utama adalah untuk melakukan pekerjaan yang mungkin tidak diperlukan.Targetnya adalah untuk menyediakan konkurensi lebih jika sumber daya tambahan yang tersedia.
Free Template Blogger collection template Hot Deals SEO
Speculative Execution
Senin, 17 Oktober 2011
Eksekusi spekulatif dalam sistem komputer adalah melakukan pekerjaan, yang hasilnya mungkin tidak diperlukan. Teknik optimasi kinerja digunakan dalam prosesor pipelined dan systems.School lainnya.
MAIN IDEA ~Eksekusi spekulatif adalah optimasi kinerja. Ide utama adalah untuk melakukan pekerjaan yang mungkin tidak diperlukan.Targetnya adalah untuk menyediakan konkurensi lebih jika sumber daya tambahan yang tersedia.
Free Template Blogger collection template Hot Deals SEO
0
Definisi: Dalam CPU , bagian dari prosesor mencoba dan mengambil instruksi dari memori sebelum mereka dibutuhkan karena kalau CPU harus menunggu instruksi. Hal ini disebut pra-mengambil dan instruksi yang diadakan di sebuah pipeline instruksi.
Free Template Blogger collection template Hot Deals SEO
Branch prediction
Definisi: Dalam CPU , bagian dari prosesor mencoba dan mengambil instruksi dari memori sebelum mereka dibutuhkan karena kalau CPU harus menunggu instruksi. Hal ini disebut pra-mengambil dan instruksi yang diadakan di sebuah pipeline instruksi.
Jika cabang terjadi maka pipa harus diisi ulang dan upaya prediksi
cabang untuk bekerja keluar jika cabang akan diambil dan mulai mengambil instruksi.Free Template Blogger collection template Hot Deals SEO
0
goenawanb.com. Kali ini kita akan membahas tentang apa sih Perbedaan Organisasi Komputer dengan Arsitektur Komputer.
Organisasi Komputer :
tag : perbedaan organisasi komputer dan arsitektur komputer , perbedaan arsitektur komputer dan organisasi komputer , organisasi komputer dan arsitektur komputer , perbedaan organisasi dan arsitektur komputer , arsitektur komputer , perbedaan organisasi komputer dengan arsitektur komputer , perbedaan arkom dan orkom , perbedaan arsitektur dan organisasi komputer , perbedaan orkom dan arkom , pengertian organisasi dan arsitektur komputer (goenawanb.com)
Free Template Blogger collection template Hot Deals SEO
Perbedaan Organisasi Komputer dengan Arsitektur Komputer
Rabu, 05 Oktober 2011
goenawanb.com. Kali ini kita akan membahas tentang apa sih Perbedaan Organisasi Komputer dengan Arsitektur Komputer.
Organisasi Komputer :
- Bagian yang terkait erat dengan unit–unit operasional
- Contoh: teknologi hardware, perangkat antarmuka, teknologi memori, sistem memori, dan sinyal–sinyal kontrol
- atribut–atribut sistem komputer yang terkait dengan seorang programmer
- Contoh: set instruksi, aritmetika yang digunakan, teknik pengalamatan, mekanisme I/O
tag : perbedaan organisasi komputer dan arsitektur komputer , perbedaan arsitektur komputer dan organisasi komputer , organisasi komputer dan arsitektur komputer , perbedaan organisasi dan arsitektur komputer , arsitektur komputer , perbedaan organisasi komputer dengan arsitektur komputer , perbedaan arkom dan orkom , perbedaan arsitektur dan organisasi komputer , perbedaan orkom dan arkom , pengertian organisasi dan arsitektur komputer (goenawanb.com)
Free Template Blogger collection template Hot Deals SEO
0
Rangkaian Water Lever Control atau yang sering disingkat dengan WLC atau rangkaian kontrol level air merupakan salah satu aplikasi dari rangkaian konvensional dalam bidang tenaga listrik yang diaplikasikan pada motor listrik khususnya motor induksi untuk pampa air. Fungsi dari rangkaian ini adalah untuk mengontrol level air dalam sebuah tangki penampungan yang banyak dijumpai di rumah-rumah atau bahkan disebuah industri di mana pada level tertentu motor listrik atau pompa air akan beroperasi dan pada level tertentu juga pompa air akan mati. Untuk mengontrol level air dalam tangki penampungan dapat menggunakan dua buah pelampung yang mana masing-masing dari pelampung tersebut menentukan batas atas dan batas dari level air.
Jadi pada saat anda sedangkan menjalankan pompa air, dengan mengaplikasikan rangkaian Water Level Control pada pompa air yang anda gunakan, anda tidak perlu menunggu hanya untuk mematikan pompa air pada saat tangki atau bak air penuh karena apabila air dalam tangki sudah penuh maka pompa akan padam dengan sendirinya tanpa harus menekan tombol stop.
Demikian juga apa bila air dalam tangki atau bak mulai berkurang sesuai dengan batas yang telah ditentukan maka pompa akan jalan dengan sendirinya. Dengan demikian ada bisa melakukan kegiatan yang lain yang lebih berguna, misalnya nonton acara gossip di Channel TV kesayangan anda sambil menikmati sedapnya pisang goreng yang dibalut dengan sambal terasi yang rasanya benar-benar nendang bangets. Lupakan tentang pisang goreng, dan untuk lebih jelasnya perhatikan bagaimana sebuah pelampung dapat bekerja pada sebuah rangkaian Water Level Control sebagai berikut :
Penjelasan dari gambar di atas :
· Pada kondisi (1) kita anggap bahwa untuk pertama beroperasi air di dalam tangki seperti yang terlihat pada gambar. Dengan keadaan yang demikian, maka otomatis Pelampung 1 yang difungsikan sebagai batas atas air dan Pelampung 2 yang difungsikan sebagai batas bawah akan menggantung pada sebuah tali pelampung sehingga menyebabkan kontak pelampung yang berada di antara 2 dan A1 akan menutup karena gaya berat dari kedua pelampung. Akibatnya, motor pompa air akan beroperasi.
· Ketika pompa air mulai mengisi tangki/bak maka pelampung 2 akan terangkat ke atas atau terapung seperti yang terlihat dalam gambar pada kondisi (2). Meskipun pelampung 2 sudah terapung, kontak pelampung tetap pada posisi close, pabrik sudah merancang dengan sedekian rupa sehingga hal demikian bisa terjadi, pelampung 1 masih mampu untuk menutup kontak pelampung sehingga pompa tetap beroperasi.
· Seiring dengan semakin bertambahnya air tangki maka Pelampung 2 akan semakin bergerak ke atas sesuai dengan volume air dalam tangki tersebut. Apabila level air telah sampai pada Pelampung 1 seperti terihat dalam gambar untuk kondisi (3) maka Pelampung 1 akan terangkat ke atas atau terapung bersama-sama dengan pelampung 2. Akibatnya, kontak pelampung antara 2 dan A1 akan membuka dan motor atau pompa air akan mati. Jadi, bukan Pelampung 2 yang mendorong Pelampung 1 sehingga kontak pelampung terbuka (open).
· Apabila air di dalam tangki atau bak mulai berkurang atau lebih rendah dari Pelampung 1, maka pelampung 1 akan menggantung pada kontak pelampung seperti lihat pada gambar untuk kondisi (4). Meskipun Pelampung 1 sudah menggantung, akan tetapi kontak pelampung masih tetap pada kondisi open karena Pelampung 1 belum cukup berat untuk menutup kontak tersebut. Jika air sudah benar-benar berkurang dalam tangki sesuai dengan batas bawah yang telah ditentukan maka pelampung 2 akan menggantung seperti pada kondisi (1) bersama-sama dengan pelampung 1. Kolaborasi kedua pelampung tersebut menghasil berat yang cukup untuk menutup kontak pelampung antara 2 dan A1 sehingga pompa air dapat berjalan atau beroperasi. Setelah itu ke kondisi (2), (3), (4), dan seterusnya.
Berikut ini adalah gambar rangkaian kendali dan sekaligus rangkaian daya dari Water Level Control. Rangkaia
ini terdiri dari dua bagian yaitu menggunakan remote untuk mengoperasikan (menjalankan dan mematikan)
ompa air dan menggunakan pelampung untuk mengoperasikan pompa air secara otomatis.
Langkah-langkah kerja rangkaian Water Level Control
1. Diasumsikan bahwa tombol emergency, MCB rangkaian control dan MCB rangkaian daya tertutup atau sudah pada posisi on.
2. Pada keadaan normal kontak overload 95 – 96 tertutup dan kontak 97 – 98 terbuka
3. Posisi 1 yaitu pada saat selektor switch dipindahkan pada posisi 1-2 maka lampu indikator L2 akan menyala yang menandakan bahwa yang bekerja adalah pelampung (otomatis)
4. Ketika air di dalam bak telah kosong atau berkurang, pelampung akan tertarik ke bawah dan menutup kontak yang terdapat pada pelampung sehingga arus akan mengalir pada kontaktor K1 dengan demikian kontak utama 1–2 pada K1 akan menutup sedangkan kontak 3-6 pada RL (Relay) tetap terbuka sehingga motor akan berputar yang di tandai dengan menyalanya lampu indikator L4
5. Apabila motor mengalami kelebihan beban maka kontak 95-96 akan membuka dan kontak 97-98 akan menutup sehingga lampu indikator L3 yang menandakan kelebihan beban akan menyala dan pada saat itu motor akan berhenti berputar.
6. Jika air di dalam bak telah penuh atau telah mencapai level yang telah ditentukan maka pelampung di dalam air akan terangkat ke atas sehingga membuka kontak yang terdapat pada pelampung tersebut dan motor akan akan berhenti berputar.
7. Proses selanjutnya kembali ke langkah nomor 4.
8. Untuk posisi 2 selektor switch dipindahkan pada posisi 3-4 maka lampu indikator L1 akan langsung menyala yang menandakan bahwa operasi motor dilakukan secara remote (menyalakan dan mematikan motor) dan pada saat itu pelampung tidak akan bekerja
9. Untuk menyalakan motor tekan push button Son
10. Kontak 1-4 akan menutup karena koil 2-10 relay (RL) mendapat energy listrik sehingga arus akan mengalir melalui kontak 1-4 tersebut walaupun saklar Son dilepas
11. Dengan demikian kontak 3-6 dan 8-11 akan menutup sedangkan kontak 1-2 pada K1 tetap terbuka, dengan demikian motor akan berputar yang ditandai dengan menyalanya lampu indikator L4
12. Apabila motor mengalami kelebihan beban maka kontak 95-96 akan membuka dan kontak 97-98 akan menutup sehingga lampu indikator L3 yang menandakan kelebihan beban akan menyala dan pada saat itu motor akan berhenti berputar.
13. Tekan push button Soff untuk mematikan motor.
14. Baik untuk operasi dengan remote ataupun secara otomatis (dengan pelampung) apabila ada hal-hal yang tidak inginkan terjadi pada saat motor beroperasi dapat langsung menekan tombol emergency sehingga seluruh rangkaian akan padam.
Rangkaian Water Level Control di atas belumlah sempurna, anda bisa memodifikasinya supaya menjadi lebih
baik lagi dan juga lebih andal pastinya. Ini cuma salah satu contoh saja, jika anda ingin berusaha sedikit saja maka
hasilnya pasti akan lebih bagus lagi dan tentunya memakai desain yang dibuat sendiri akan memberikan kepuasan
yang tersendiri pula.
Ada beberapa catatan yang saya ingin berikan mengenai rangkaian di atas :
1. Untuk pengoperasian pompa dengan remote, saya menggunakan relay yang dalam rangkaian disingkat dengan RL dengan pertimbangan penggunaan remote hanyalah sebagai cadangan jika pelampung mengalami kegagalan dalam pengoperasiannya. Anda dapat menggantinya dengan kontaktor. Jika anda menggunakan relay, relaynya harus disesuaikan dengan kapasitas arus dari motor pompa. Kalau tidak sesuai, bisa-bisa relaynya hangus dan anda akan merogoh kocek lebih dalam lagi. Menyedihkan!
2. Motor yang digunakan pada rangkaian di atas adalah motor induksi 1 fasa. Jika anda menggunakan motor induksi 3 fasa, maka rangkaian kontrolnya akan lebih rumit lagi. Silahkan anda berkreasi sendiri.
3. Pada kondisi (3) dari gambar pelampung, usahakan jangan sampai tali pada pelampung terjadi lilitan yang menyebabkan terbentuknya sebuah simpul sehingga kedua pelampung berkumpul pada satu titik pada tali pelampung. Hal ini akan menyebabkan pompa mati menyala dalam waktu yang relatif singkat. Apabila hal ini terjadi, maka lampu indikator L4 pada gambar akan berkedip-kedip. Keuntungannya, anda akan melihat nyala lampu indikator yang berkedip-kedip pada panel sehingga anda tidak perlu membeli lampu hias di toko kesayangan anda. Kerugiannya, anda akan berteriak histeris sampai nadanya mungkin mencapai 7 oktaf (melebihi Gita Gutawa) karena melihat tagihan rekening listrik anda yang meningkat dari biasanya jika anda membiarkan hal tersebut terus berlangsung. Tentu saja penyebabnya adalah motor mati menyala dalam waktu yang relative singkat, yang mana kita tahu bersama bahwa arus start dari motor induksi bisa 5 sampai 7 kali lebih besar dari arus nominalnya yang mana juga akan mempengaruhi putaran kWh meter anda.
4. Pengalaman adalah guru yang baik tetapi belajar dari pengalaman orang lain adalah Guru Terbaik. Jadi, jangan segan-segan untuk berlajar dari orang-orang yang sudah berpengalaman. So, take my advice and Go On! Thanks.
Free Template Blogger collection template Hot Deals SEO
rangkaian WLC
Rabu, 11 Mei 2011
Rangkaian Water Lever Control atau yang sering disingkat dengan WLC atau rangkaian kontrol level air merupakan salah satu aplikasi dari rangkaian konvensional dalam bidang tenaga listrik yang diaplikasikan pada motor listrik khususnya motor induksi untuk pampa air. Fungsi dari rangkaian ini adalah untuk mengontrol level air dalam sebuah tangki penampungan yang banyak dijumpai di rumah-rumah atau bahkan disebuah industri di mana pada level tertentu motor listrik atau pompa air akan beroperasi dan pada level tertentu juga pompa air akan mati. Untuk mengontrol level air dalam tangki penampungan dapat menggunakan dua buah pelampung yang mana masing-masing dari pelampung tersebut menentukan batas atas dan batas dari level air.
Jadi pada saat anda sedangkan menjalankan pompa air, dengan mengaplikasikan rangkaian Water Level Control pada pompa air yang anda gunakan, anda tidak perlu menunggu hanya untuk mematikan pompa air pada saat tangki atau bak air penuh karena apabila air dalam tangki sudah penuh maka pompa akan padam dengan sendirinya tanpa harus menekan tombol stop.
Demikian juga apa bila air dalam tangki atau bak mulai berkurang sesuai dengan batas yang telah ditentukan maka pompa akan jalan dengan sendirinya. Dengan demikian ada bisa melakukan kegiatan yang lain yang lebih berguna, misalnya nonton acara gossip di Channel TV kesayangan anda sambil menikmati sedapnya pisang goreng yang dibalut dengan sambal terasi yang rasanya benar-benar nendang bangets. Lupakan tentang pisang goreng, dan untuk lebih jelasnya perhatikan bagaimana sebuah pelampung dapat bekerja pada sebuah rangkaian Water Level Control sebagai berikut :
 |
| Gambar 1. Prinsip Kerja Pelampung |
· Pada kondisi (1) kita anggap bahwa untuk pertama beroperasi air di dalam tangki seperti yang terlihat pada gambar. Dengan keadaan yang demikian, maka otomatis Pelampung 1 yang difungsikan sebagai batas atas air dan Pelampung 2 yang difungsikan sebagai batas bawah akan menggantung pada sebuah tali pelampung sehingga menyebabkan kontak pelampung yang berada di antara 2 dan A1 akan menutup karena gaya berat dari kedua pelampung. Akibatnya, motor pompa air akan beroperasi.
· Ketika pompa air mulai mengisi tangki/bak maka pelampung 2 akan terangkat ke atas atau terapung seperti yang terlihat dalam gambar pada kondisi (2). Meskipun pelampung 2 sudah terapung, kontak pelampung tetap pada posisi close, pabrik sudah merancang dengan sedekian rupa sehingga hal demikian bisa terjadi, pelampung 1 masih mampu untuk menutup kontak pelampung sehingga pompa tetap beroperasi.
· Seiring dengan semakin bertambahnya air tangki maka Pelampung 2 akan semakin bergerak ke atas sesuai dengan volume air dalam tangki tersebut. Apabila level air telah sampai pada Pelampung 1 seperti terihat dalam gambar untuk kondisi (3) maka Pelampung 1 akan terangkat ke atas atau terapung bersama-sama dengan pelampung 2. Akibatnya, kontak pelampung antara 2 dan A1 akan membuka dan motor atau pompa air akan mati. Jadi, bukan Pelampung 2 yang mendorong Pelampung 1 sehingga kontak pelampung terbuka (open).
· Apabila air di dalam tangki atau bak mulai berkurang atau lebih rendah dari Pelampung 1, maka pelampung 1 akan menggantung pada kontak pelampung seperti lihat pada gambar untuk kondisi (4). Meskipun Pelampung 1 sudah menggantung, akan tetapi kontak pelampung masih tetap pada kondisi open karena Pelampung 1 belum cukup berat untuk menutup kontak tersebut. Jika air sudah benar-benar berkurang dalam tangki sesuai dengan batas bawah yang telah ditentukan maka pelampung 2 akan menggantung seperti pada kondisi (1) bersama-sama dengan pelampung 1. Kolaborasi kedua pelampung tersebut menghasil berat yang cukup untuk menutup kontak pelampung antara 2 dan A1 sehingga pompa air dapat berjalan atau beroperasi. Setelah itu ke kondisi (2), (3), (4), dan seterusnya.
Berikut ini adalah gambar rangkaian kendali dan sekaligus rangkaian daya dari Water Level Control. Rangkaia
ini terdiri dari dua bagian yaitu menggunakan remote untuk mengoperasikan (menjalankan dan mematikan)
ompa air dan menggunakan pelampung untuk mengoperasikan pompa air secara otomatis.
 |
| Gambar 2. Rangkaian kendali dan rangkaian daya |
1. Diasumsikan bahwa tombol emergency, MCB rangkaian control dan MCB rangkaian daya tertutup atau sudah pada posisi on.
2. Pada keadaan normal kontak overload 95 – 96 tertutup dan kontak 97 – 98 terbuka
3. Posisi 1 yaitu pada saat selektor switch dipindahkan pada posisi 1-2 maka lampu indikator L2 akan menyala yang menandakan bahwa yang bekerja adalah pelampung (otomatis)
4. Ketika air di dalam bak telah kosong atau berkurang, pelampung akan tertarik ke bawah dan menutup kontak yang terdapat pada pelampung sehingga arus akan mengalir pada kontaktor K1 dengan demikian kontak utama 1–2 pada K1 akan menutup sedangkan kontak 3-6 pada RL (Relay) tetap terbuka sehingga motor akan berputar yang di tandai dengan menyalanya lampu indikator L4
5. Apabila motor mengalami kelebihan beban maka kontak 95-96 akan membuka dan kontak 97-98 akan menutup sehingga lampu indikator L3 yang menandakan kelebihan beban akan menyala dan pada saat itu motor akan berhenti berputar.
6. Jika air di dalam bak telah penuh atau telah mencapai level yang telah ditentukan maka pelampung di dalam air akan terangkat ke atas sehingga membuka kontak yang terdapat pada pelampung tersebut dan motor akan akan berhenti berputar.
7. Proses selanjutnya kembali ke langkah nomor 4.
8. Untuk posisi 2 selektor switch dipindahkan pada posisi 3-4 maka lampu indikator L1 akan langsung menyala yang menandakan bahwa operasi motor dilakukan secara remote (menyalakan dan mematikan motor) dan pada saat itu pelampung tidak akan bekerja
9. Untuk menyalakan motor tekan push button Son
10. Kontak 1-4 akan menutup karena koil 2-10 relay (RL) mendapat energy listrik sehingga arus akan mengalir melalui kontak 1-4 tersebut walaupun saklar Son dilepas
11. Dengan demikian kontak 3-6 dan 8-11 akan menutup sedangkan kontak 1-2 pada K1 tetap terbuka, dengan demikian motor akan berputar yang ditandai dengan menyalanya lampu indikator L4
12. Apabila motor mengalami kelebihan beban maka kontak 95-96 akan membuka dan kontak 97-98 akan menutup sehingga lampu indikator L3 yang menandakan kelebihan beban akan menyala dan pada saat itu motor akan berhenti berputar.
13. Tekan push button Soff untuk mematikan motor.
14. Baik untuk operasi dengan remote ataupun secara otomatis (dengan pelampung) apabila ada hal-hal yang tidak inginkan terjadi pada saat motor beroperasi dapat langsung menekan tombol emergency sehingga seluruh rangkaian akan padam.
Rangkaian Water Level Control di atas belumlah sempurna, anda bisa memodifikasinya supaya menjadi lebih
baik lagi dan juga lebih andal pastinya. Ini cuma salah satu contoh saja, jika anda ingin berusaha sedikit saja maka
hasilnya pasti akan lebih bagus lagi dan tentunya memakai desain yang dibuat sendiri akan memberikan kepuasan
yang tersendiri pula.
Ada beberapa catatan yang saya ingin berikan mengenai rangkaian di atas :
1. Untuk pengoperasian pompa dengan remote, saya menggunakan relay yang dalam rangkaian disingkat dengan RL dengan pertimbangan penggunaan remote hanyalah sebagai cadangan jika pelampung mengalami kegagalan dalam pengoperasiannya. Anda dapat menggantinya dengan kontaktor. Jika anda menggunakan relay, relaynya harus disesuaikan dengan kapasitas arus dari motor pompa. Kalau tidak sesuai, bisa-bisa relaynya hangus dan anda akan merogoh kocek lebih dalam lagi. Menyedihkan!
2. Motor yang digunakan pada rangkaian di atas adalah motor induksi 1 fasa. Jika anda menggunakan motor induksi 3 fasa, maka rangkaian kontrolnya akan lebih rumit lagi. Silahkan anda berkreasi sendiri.
3. Pada kondisi (3) dari gambar pelampung, usahakan jangan sampai tali pada pelampung terjadi lilitan yang menyebabkan terbentuknya sebuah simpul sehingga kedua pelampung berkumpul pada satu titik pada tali pelampung. Hal ini akan menyebabkan pompa mati menyala dalam waktu yang relatif singkat. Apabila hal ini terjadi, maka lampu indikator L4 pada gambar akan berkedip-kedip. Keuntungannya, anda akan melihat nyala lampu indikator yang berkedip-kedip pada panel sehingga anda tidak perlu membeli lampu hias di toko kesayangan anda. Kerugiannya, anda akan berteriak histeris sampai nadanya mungkin mencapai 7 oktaf (melebihi Gita Gutawa) karena melihat tagihan rekening listrik anda yang meningkat dari biasanya jika anda membiarkan hal tersebut terus berlangsung. Tentu saja penyebabnya adalah motor mati menyala dalam waktu yang relative singkat, yang mana kita tahu bersama bahwa arus start dari motor induksi bisa 5 sampai 7 kali lebih besar dari arus nominalnya yang mana juga akan mempengaruhi putaran kWh meter anda.
4. Pengalaman adalah guru yang baik tetapi belajar dari pengalaman orang lain adalah Guru Terbaik. Jadi, jangan segan-segan untuk berlajar dari orang-orang yang sudah berpengalaman. So, take my advice and Go On! Thanks.
Free Template Blogger collection template Hot Deals SEO
1
 This is another solar powered “power-smart” head, built around a 74AC240 chip. Ini adalah satu lagi tenaga surya "kekuatan-pintar" kepala, dibangun di sekitar chip 74AC240. The circuit is the Solar Power Smart Head circuit . sirkuit adalah Solar Power Smart Kepala sirkuit . The motor is a nice geared 141:1 MicroMo motor I got off Ebay. Motor adalah ditujukan bagus 141:1 MicroMo motor saya turun dari Ebay. It has a cog attached to the spindle, which allowed me to mount it in a drilled-out hard drive part for the base. Memiliki gigi yang melekat pada mesin, yang memungkinkan saya untuk me-mount di bagian drive dibor-out sulit bagi dasar.
This is another solar powered “power-smart” head, built around a 74AC240 chip. Ini adalah satu lagi tenaga surya "kekuatan-pintar" kepala, dibangun di sekitar chip 74AC240. The circuit is the Solar Power Smart Head circuit . sirkuit adalah Solar Power Smart Kepala sirkuit . The motor is a nice geared 141:1 MicroMo motor I got off Ebay. Motor adalah ditujukan bagus 141:1 MicroMo motor saya turun dari Ebay. It has a cog attached to the spindle, which allowed me to mount it in a drilled-out hard drive part for the base. Memiliki gigi yang melekat pada mesin, yang memungkinkan saya untuk me-mount di bagian drive dibor-out sulit bagi dasar.
This guy fires every few seconds under bright light, and almost continuously in daylight, rotating quite quickly, and smoothly to point towards the brightest part of the environment. Orang ini kebakaran setiap beberapa detik di bawah cahaya terang, dan hampir terus menerus di siang hari, berputar cukup cepat, dan lancar ke titik menuju bagian terang dari lingkungan. I'm pleased with it. Saya senang dengan itu.

 This is one of the first free-formed BEAM bots that I built. Ini adalah salah satu bot pertama BALOK bebas terbentuk yang saya dibangun. The circuit is a 1381-based solar engine circuit, and is built around the motor, with components placed radially around a central axis. Rangkaian ini adalah berbasis surya mesin 1381 sirkuit, dan dibangun di sekitar motor, dengan komponen ditempatkan radial di sekitar sumbu pusat. I used a platter from a laptop hard drive as the bumper. Saya menggunakan piring dari hard drive laptop sebagai bumper.
This is one of the first free-formed BEAM bots that I built. Ini adalah salah satu bot pertama BALOK bebas terbentuk yang saya dibangun. The circuit is a 1381-based solar engine circuit, and is built around the motor, with components placed radially around a central axis. Rangkaian ini adalah berbasis surya mesin 1381 sirkuit, dan dibangun di sekitar motor, dengan komponen ditempatkan radial di sekitar sumbu pusat. I used a platter from a laptop hard drive as the bumper. Saya menggunakan piring dari hard drive laptop sebagai bumper.
The trick with symets is to get the angle relative to the ground and the spindle ground contact right so that the symet moves in a straight line until it hits something. Trik dengan symets adalah untuk mendapatkan sudut relatif terhadap tanah dan kontak tanah gelendong kanan sehingga symet bergerak dalam garis lurus sampai hits sesuatu. I failed with this one, but it jiggers around in circles quite happily. Aku gagal dengan yang satu ini, tapi jiggers berputar-putar cukup gembira. I also learnt that hot-glue solidifies instantly when it comes into contact with cold metal. Saya juga belajar bahwa panas-lem membeku seketika ketika datang ke dalam kontak dengan logam dingin. Either use the tip of the hot glue gun to heat the metal before glueing, or use epoxy. Entah menggunakan ujung pistol lem panas untuk memanaskan logam sebelum pengeleman, atau menggunakan epoxy.
I played for a while with several turbot circuits, particularly those by J Wolfgang Goerlich (who has an excellent series of pages on various turbot designs ). Saya bermain untuk sementara waktu dengan sirkuit beberapa turbot, terutama oleh J Wolfgang Goerlich (yang memiliki seri yang sangat baik halaman di desain berbagai turbot ). His Scuff turbot looked particularly promising, as it was solar powered, and had phototactic behavior. Nya turbot lecet tampak sangat menjanjikan, seperti yang bertenaga surya, dan memiliki perilaku phototactic.
However, I was also wanted to build a bot whose workings fitted neatly between two solar cells. Namun, saya juga ingin membangun bot kerja yang dipasang rapi antara dua sel surya. That dictated the body shape (rectangular), which severely limited the behavior, since it's hard to get turning if the axis of rotation for both flagella is the same. Yang mendikte bentuk tubuh (persegi panjang), yang sangat terbatas perilaku, karena sulit untuk mendapatkan balik jika sumbu rotasi untuk flagela keduanya adalah sama. But I wanted something slightly more complex than a single-motor turbot. Tapi aku ingin sesuatu yang sedikit lebih kompleks daripada turbot tunggal motor.
 The circuit I came up with is a simple modification of a 74AC240-based photovore design (but I wish I'd seen Wilf's caveat about this circuit first!). Rangkaian ini saya datang dengan merupakan modifikasi sederhana dari sebuah photovore berdasarkan desain-74AC240 (tapi aku berharap aku melihat Wilf's peringatan tentang hal ini rangkaian pertama!). First, it's solarized with a Miller solar engine . Pertama, itu solarized dengan mesin surya Miller . Secondly, I wanted the circuit to choose which motor to drive based on which solar cell was getting more light (ie the bot knows which way is “up”). Kedua, saya ingin sirkuit untuk memilih motor untuk drive berdasarkan yang sel surya mendapatkan cahaya lebih (yaitu bot yang tahu cara adalah "up"). Since the bot has two solar cells, I could replace the photodiode voltage divider in that circuit with the solar cells themselves, by taking a reference voltage from between the two cells (which are wired in series), via a large resitor. Karena bot memiliki dua sel surya, aku bisa mengganti pembagi tegangan photodiode di sirkuit yang dengan sel surya sendiri, dengan mengambil tegangan referensi dari antara dua sel (yang kabel dalam seri), melalui resitor besar. Reverse-biased Schottky diodes across each solar cell ensure that the unlit cell doesn't limit the charging current. Reverse-bias dioda Schottky di setiap sel surya memastikan bahwa sel gelap tidak membatasi arus pengisian.
The circuit I came up with is a simple modification of a 74AC240-based photovore design (but I wish I'd seen Wilf's caveat about this circuit first!). Rangkaian ini saya datang dengan merupakan modifikasi sederhana dari sebuah photovore berdasarkan desain-74AC240 (tapi aku berharap aku melihat Wilf's peringatan tentang hal ini rangkaian pertama!). First, it's solarized with a Miller solar engine . Pertama, itu solarized dengan mesin surya Miller . Secondly, I wanted the circuit to choose which motor to drive based on which solar cell was getting more light (ie the bot knows which way is “up”). Kedua, saya ingin sirkuit untuk memilih motor untuk drive berdasarkan yang sel surya mendapatkan cahaya lebih (yaitu bot yang tahu cara adalah "up"). Since the bot has two solar cells, I could replace the photodiode voltage divider in that circuit with the solar cells themselves, by taking a reference voltage from between the two cells (which are wired in series), via a large resitor. Karena bot memiliki dua sel surya, aku bisa mengganti pembagi tegangan photodiode di sirkuit yang dengan sel surya sendiri, dengan mengambil tegangan referensi dari antara dua sel (yang kabel dalam seri), melalui resitor besar. Reverse-biased Schottky diodes across each solar cell ensure that the unlit cell doesn't limit the charging current. Reverse-bias dioda Schottky di setiap sel surya memastikan bahwa sel gelap tidak membatasi arus pengisian.
The innards of this beast are shown below. Jeroan dari binatang ini ditunjukkan di bawah ini. It's pretty tightly packed! It's pretty padat! (Click the image for a larger view.) (Klik gambar untuk tampilan yang lebih besar.)
 You can see the Miller SE in the top-left corner. Anda dapat melihat SE Miller di pojok kiri. There are two 74AC240s: doubled-up to increase the drive current for the motors. Ada dua 74AC240s: dua kali lipat-up untuk meningkatkan drive saat ini untuk motor. The main storage capacitor is 0.047F; on its own, it can't dump enough current to reliably start up the gearmotors (which are GM11s from Solarbotics ), so there's another 1000µF capacitor in parallel to get things going. Penyimpanan utama kapasitor adalah 0.047F; sendiri, tidak dapat dump cukup saat ini untuk memulai andal yang gearmotors (yang GM11s dari Solarbotics ), jadi ada kapasitor lain 1000μF secara paralel untuk mendapatkan hal yang terjadi. The whole thing is epoxied together, with some scrap plastic spacers to allow the gears to clear the solder pads on the solar cells. Seluruh hal yang epoxied bersama-sama, dengan beberapa spacer scrap plastik untuk memungkinkan roda gigi untuk membersihkan bantalan solder pada sel surya.
You can see the Miller SE in the top-left corner. Anda dapat melihat SE Miller di pojok kiri. There are two 74AC240s: doubled-up to increase the drive current for the motors. Ada dua 74AC240s: dua kali lipat-up untuk meningkatkan drive saat ini untuk motor. The main storage capacitor is 0.047F; on its own, it can't dump enough current to reliably start up the gearmotors (which are GM11s from Solarbotics ), so there's another 1000µF capacitor in parallel to get things going. Penyimpanan utama kapasitor adalah 0.047F; sendiri, tidak dapat dump cukup saat ini untuk memulai andal yang gearmotors (yang GM11s dari Solarbotics ), jadi ada kapasitor lain 1000μF secara paralel untuk mendapatkan hal yang terjadi. The whole thing is epoxied together, with some scrap plastic spacers to allow the gears to clear the solder pads on the solar cells. Seluruh hal yang epoxied bersama-sama, dengan beberapa spacer scrap plastik untuk memungkinkan roda gigi untuk membersihkan bantalan solder pada sel surya.
This guy is pretty active in bright light, churning his way in straight line. Orang ini cukup aktif dalam cahaya terang, cara berputar di garis lurus. It has a few issues, like it can end up balanced on one end, with neither cell getting much light (which could be fixed by adding some bumps to make it topple over), and the legs can hit each other. Ini memiliki beberapa masalah, seperti itu akhirnya dapat seimbang pada salah satu ujungnya, dengan sel tidak mendapatkan banyak cahaya (yang dapat diperbaiki dengan menambahkan beberapa benjolan untuk membuatnya menjatuhkan atas), serta kaki bisa memukul satu sama lain. But the compact construction appeals to me. Tetapi banding konstruksi kompak kepada saya.
 This is a solarized power-smart head . Ini adalah power head-smart solarized . It's based on a 74AC240, with two storage capacitors (the big silver cylinders), and photodiodes for “eyes”. Ini didasarkan pada 74AC240, dengan dua kapasitor penyimpanan (silinder perak besar), dan foto dioda untuk "mata". The solar engine is free-formed to lie over the IC. Mesin matahari bebas-dibentuk untuk berbohong atas IC. The motor is a Nihon gear motor from a lens assembly (courtesy of Fair Radio Sales ), epoxied into a base made from hard drive motor parts. Motor merupakan alat Nihon motor dari perakitan lensa (courtesy of Radio Sales Fair ), epoxied menjadi dasar terbuat dari bagian-bagian motor hard drive.
This is a solarized power-smart head . Ini adalah power head-smart solarized . It's based on a 74AC240, with two storage capacitors (the big silver cylinders), and photodiodes for “eyes”. Ini didasarkan pada 74AC240, dengan dua kapasitor penyimpanan (silinder perak besar), dan foto dioda untuk "mata". The solar engine is free-formed to lie over the IC. Mesin matahari bebas-dibentuk untuk berbohong atas IC. The motor is a Nihon gear motor from a lens assembly (courtesy of Fair Radio Sales ), epoxied into a base made from hard drive motor parts. Motor merupakan alat Nihon motor dari perakitan lensa (courtesy of Radio Sales Fair ), epoxied menjadi dasar terbuat dari bagian-bagian motor hard drive.
This head works pretty well, but looks a bit ugly. kepala ini bekerja dengan cukup baik, namun tampak agak jelek. It's harder to position the components around the cylindrical motor than the nice cuboidal Omron units. Lebih sulit untuk posisi komponen di sekitar motor silinder dari unit bagus Omron cuboidal.
 The spinner is a very simple bot that simply charges up the capacity (the green squat cylinder in the image) via the solar panel, which then discharges through the motor when a certain voltage is reached. pemintal adalah sangat sederhana bot bahwa hanya biaya sampai kapasitas (silinder jongkok hijau pada gambar) melalui panel surya, yang kemudian pembuangan melalui motor ketika tegangan tertentu tercapai. This is exactly the same circuit as the symet (with some adjustment of component values), but the bot is configured “standing on its head” so that the head spins around when the motor fires. Ini adalah sirkuit yang sama persis dengan symet (dengan beberapa penyesuaian nilai komponen), tetapi bot dikonfigurasi "berdiri di atas kepala" sehingga kepala berputar ketika kebakaran motor.
The spinner is a very simple bot that simply charges up the capacity (the green squat cylinder in the image) via the solar panel, which then discharges through the motor when a certain voltage is reached. pemintal adalah sangat sederhana bot bahwa hanya biaya sampai kapasitas (silinder jongkok hijau pada gambar) melalui panel surya, yang kemudian pembuangan melalui motor ketika tegangan tertentu tercapai. This is exactly the same circuit as the symet (with some adjustment of component values), but the bot is configured “standing on its head” so that the head spins around when the motor fires. Ini adalah sirkuit yang sama persis dengan symet (dengan beberapa penyesuaian nilai komponen), tetapi bot dikonfigurasi "berdiri di atas kepala" sehingga kepala berputar ketika kebakaran motor.
 This was a fairly easy robot to build. Ini adalah robot cukup mudah untuk membangun. One thing to be aware of is that when you have your circuit on the breadboard, running a motor with no load, the motor will spin for much longer than it does under load. Satu hal yang harus diperhatikan adalah bahwa ketika Anda memiliki sirkuit Anda pada papan tempat memotong roti tersebut, menjalankan motor tanpa beban, motor akan berputar lebih lama dari itu tidak di bawah beban. I had to retrofit a larger timing capacitor on the Miller engine to have this guy spin for a reasonable amount of time on each charge. Aku harus retrofit sebuah waktu yang lebih besar kapasitor pada mesin Miller untuk memiliki spin pria untuk jumlah waktu yang wajar pada setiap biaya. You can see the solar engine here: Anda dapat melihat mesin surya di sini:
This was a fairly easy robot to build. Ini adalah robot cukup mudah untuk membangun. One thing to be aware of is that when you have your circuit on the breadboard, running a motor with no load, the motor will spin for much longer than it does under load. Satu hal yang harus diperhatikan adalah bahwa ketika Anda memiliki sirkuit Anda pada papan tempat memotong roti tersebut, menjalankan motor tanpa beban, motor akan berputar lebih lama dari itu tidak di bawah beban. I had to retrofit a larger timing capacitor on the Miller engine to have this guy spin for a reasonable amount of time on each charge. Aku harus retrofit sebuah waktu yang lebih besar kapasitor pada mesin Miller untuk memiliki spin pria untuk jumlah waktu yang wajar pada setiap biaya. You can see the solar engine here: Anda dapat melihat mesin surya di sini:
The copper loops are actually large C-clips from some large (projector or copier) lens assemblies, hot-glued onto the motor body, and soldered to eachother. Loop tembaga sebenarnya besar C-klip dari beberapa (proyektor atau mesin fotokopi) besar majelis lensa, panas menempel ke tubuh motor, dan disolder ke eachother.
 This is my third attempt at a solar head, again using a Nihon gear motor like my second one . Ini adalah usaha ketiga saya di kepala surya, kembali menggunakan motor gear Nihon seperti saya satu detik . I was trying to improve the aesthetic, as well as experimenting with the Power Smart Head Version 3 circuit . Aku sedang berusaha untuk memperbaiki estetika, serta bereksperimen dengan Kepala Smart Versi 3 sirkuit Power . I couldn't get the latching SE to work very well in that circuit, so I modified the circuit to use a standard Miller solar engine, and was thus able to use the spare inverters to help drive the motor. Aku tidak bisa mendapatkan SE latching untuk bekerja sangat baik di sirkuit itu, jadi saya memodifikasi sirkuit untuk menggunakan mesin standar Miller surya, dan dengan demikian dapat menggunakan inverter cadangan untuk membantu mendorong motor.
This is my third attempt at a solar head, again using a Nihon gear motor like my second one . Ini adalah usaha ketiga saya di kepala surya, kembali menggunakan motor gear Nihon seperti saya satu detik . I was trying to improve the aesthetic, as well as experimenting with the Power Smart Head Version 3 circuit . Aku sedang berusaha untuk memperbaiki estetika, serta bereksperimen dengan Kepala Smart Versi 3 sirkuit Power . I couldn't get the latching SE to work very well in that circuit, so I modified the circuit to use a standard Miller solar engine, and was thus able to use the spare inverters to help drive the motor. Aku tidak bisa mendapatkan SE latching untuk bekerja sangat baik di sirkuit itu, jadi saya memodifikasi sirkuit untuk menggunakan mesin standar Miller surya, dan dengan demikian dapat menggunakan inverter cadangan untuk membantu mendorong motor.
Unfortunately, this beast needs very bright light to work well, so it needs direct sunlight to perform at its best. Sayangnya, binatang ini perlu cahaya yang sangat terang untuk bekerja dengan baik, sehingga perlu sinar matahari langsung untuk melakukan yang terbaik. I might try it with a lower voltage trigger at some point. Saya mungkin akan mencoba dengan pemicu tegangan lebih rendah di beberapa titik.
 The bot is a simple solar roller , driven by a Miller solar engine . Bot adalah sederhana roller matahari , didorong oleh surya mesin Miller . The arm is attached to the spindle of an efficient gear motor, and there's a 0.047F storage capacitor inside. lengan melekat ke sumbu dari sebuah motor gigi efisien, dan ada di dalam penyimpanan 0.047F kapasitor. The flexible solar cell is wrapped around two toy wheels, one of which has its center removed for the motor. Sel surya fleksibel melilit dua roda mainan, salah satunya memiliki pusat dikeluarkan untuk motor. The goofy rubber tires fit over the ends. Ban karet konyol pas di atas berakhir. You can see the bot's innards here . Anda dapat melihat bot's jeroan di sini .
The bot is a simple solar roller , driven by a Miller solar engine . Bot adalah sederhana roller matahari , didorong oleh surya mesin Miller . The arm is attached to the spindle of an efficient gear motor, and there's a 0.047F storage capacitor inside. lengan melekat ke sumbu dari sebuah motor gigi efisien, dan ada di dalam penyimpanan 0.047F kapasitor. The flexible solar cell is wrapped around two toy wheels, one of which has its center removed for the motor. Sel surya fleksibel melilit dua roda mainan, salah satunya memiliki pusat dikeluarkan untuk motor. The goofy rubber tires fit over the ends. Ban karet konyol pas di atas berakhir. You can see the bot's innards here . Anda dapat melihat bot's jeroan di sini .
In full sunlight, this bot fires every few seconds, which more often than I thought it would given that only a proportion of the cell is getting direct light. Dalam sinar matahari penuh, bot ini kebakaran setiap beberapa detik, yang lebih sering daripada yang saya pikir akan mengingat bahwa hanya sebagian sel semakin cahaya langsung. It can also clamber over low obstacles. Hal ini juga dapat memanjat rintangan rendah.
I've been toying with the idea for a while of using two solar panels in place of the photodiodes, and simply taking a mid-point voltage reference to figure out which panel is getting more light. Aku sudah bermain-main dengan ide untuk sementara menggunakan dua panel surya di tempat foto dioda, dan hanya mengambil referensi tegangan titik tengah untuk mencari tahu mana panel semakin lebih ringan. Then, given the appropriate configuration of solar panels and motor wiring, it should be easy to make a bot that heads towards the light with no photodiodes. Kemudian, mengingat konfigurasi panel surya yang tepat dan kabel motor, harus mudah untuk membuat bot bahwa kepala terhadap cahaya tanpa foto dioda. This is the result (with schematic this time!). Ini adalah hasil (dengan skema waktu ini!).

 Its body is the 74AC240 chip, with a capacitor abdomen. Tubuhnya adalah chip 74AC240, dengan perut kapasitor. The head is the Miller solar engine , which uses a couple of surface mount components; an old SMT diode, and a tiny capacitor, both salvaged from old circuit boards: Kepala adalah matahari mesin Miller , yang menggunakan beberapa mount permukaan komponen, sebuah dioda SMT tua, dan sebuah kapasitor kecil, baik diselamatkan dari papan sirkuit lama:
Its body is the 74AC240 chip, with a capacitor abdomen. Tubuhnya adalah chip 74AC240, dengan perut kapasitor. The head is the Miller solar engine , which uses a couple of surface mount components; an old SMT diode, and a tiny capacitor, both salvaged from old circuit boards: Kepala adalah matahari mesin Miller , yang menggunakan beberapa mount permukaan komponen, sebuah dioda SMT tua, dan sebuah kapasitor kecil, baik diselamatkan dari papan sirkuit lama:
 This guy works well. Orang ini bekerja dengan baik. It's a little slow to pop if the light is only hitting one panel, but takes very few pops to orient itself towards the light. Ini agak lambat untuk pop jika cahaya hanya memukul satu panel, tetapi mengambil sangat sedikit muncul untuk mengarahkan diri menuju cahaya. Once both panels are getting equal illumination, both motors pop and it goes forwards. Setelah kedua panel mendapatkan pencahayaan yang sama, baik motor pop dan ia pergi ke depan.
This guy works well. Orang ini bekerja dengan baik. It's a little slow to pop if the light is only hitting one panel, but takes very few pops to orient itself towards the light. Ini agak lambat untuk pop jika cahaya hanya memukul satu panel, tetapi mengambil sangat sedikit muncul untuk mengarahkan diri menuju cahaya. Once both panels are getting equal illumination, both motors pop and it goes forwards. Setelah kedua panel mendapatkan pencahayaan yang sama, baik motor pop dan ia pergi ke depan.
 BEAM is an acronym for “Biology, Electronics, Aesthetics, and Mechanics”, which describes the major influences on BEAM robot designs. BEAM adalah singkatan dari "Biology, Electronics, Estetika, dan Mekanika", yang menggambarkan pengaruh utama pada desain robot BALOK.
BEAM is an acronym for “Biology, Electronics, Aesthetics, and Mechanics”, which describes the major influences on BEAM robot designs. BEAM adalah singkatan dari "Biology, Electronics, Estetika, dan Mekanika", yang menggambarkan pengaruh utama pada desain robot BALOK.
I wanted to make a bot with this circuit that could swing a full 360°, using some hard drive magnets and the Solarbotics “ Major Henry ” coil. Saya ingin membuat bot dengan sirkuit yang bisa ayunan 360 ° penuh, menggunakan beberapa magnet hard drive dan Solarbotics " Mayor Henry "coil. My first attempt used a stripped CD-ROM motor for the axle, but that had too much damping (even after removing the magnets). upaya pertama saya menggunakan CD-ROM motor dilucuti untuk as roda, tetapi itu terlalu banyak redaman (bahkan setelah mengeluarkan magnet). I ended up using a VCR pinch roller, which has a very free-rotating bearing (but had to be laboriously stripped of its rubber wheel). Saya akhirnya menggunakan roller VCR sejumput, yang memiliki dampak yang sangat bebas berputar (tapi harus susah payah ditelanjangi roda karet).
I was lucky to find a hard drive magnet pair in a frame, from an older hard drive. Aku cukup beruntung menemukan magnet sepasang hard drive dalam bingkai, dari hard drive yang lebih tua. The vertical chassis is from an old VCR. Casing vertikal dari VCR tua. The body of the rotating part is a hard drive head mechanism, which happened to fit nicely over the pinch roller hub. Tubuh adalah bagian yang berputar kepala mekanisme hard drive, yang terjadi agar sesuai dengan baik selama hub roller mencubit. The circuit is mounted on this arm, with some care taken to balance it so that the arm can swing all the way around given enough force. Rangkaian ini dipasang pada lengan ini, dengan beberapa perawatan diambil untuk menyeimbangkannya sehingga lengan bisa swing semua jalan di sekitar kekuatan yang cukup diberikan.

 This is a fun bot to watch. Ini menyenangkan bot untuk menonton. In bright light, it starts swinging almost immediately, and after a few swings just makes it to the top, then over. Dalam cahaya terang, mulai berayun hampir segera, dan setelah beberapa ayunan hanya membuat ke atas, kemudian berakhir. After that it'll keep rotating all the way around. Setelah itu akan terus berputar sepanjang jalan sekitar.
This is a fun bot to watch. Ini menyenangkan bot untuk menonton. In bright light, it starts swinging almost immediately, and after a few swings just makes it to the top, then over. Dalam cahaya terang, mulai berayun hampir segera, dan setelah beberapa ayunan hanya membuat ke atas, kemudian berakhir. After that it'll keep rotating all the way around. Setelah itu akan terus berputar sepanjang jalan sekitar.
 A defunct laser disk player provided the motor and gears; it's the assembly that flips the read head from one side of the disk to the other. Seorang pemain mati laser disk menyediakan motor dan gigi; itu majelis yang membalik kepala membaca dari satu sisi disk yang lain. A nice large solar panel allows the bot to run under reasonably bright indoor lighting, and the usual pair of photodiodes are tucked under the solar panel. Sebuah panel surya bagus besar memungkinkan bot untuk berjalan di bawah pencahayaan dalam ruangan cukup terang, dan pasangan biasa foto dioda yang terselip di bawah panel surya. The base is a chunk of steel that held the head magnets on a big old hard disk, and is heavy enough so that the whole thing doesn't fall over. dasar adalah sepotong baja yang memegang kepala magnet pada hard disk yang besar tua, dan cukup berat sehingga semuanya tidak jatuh.
A defunct laser disk player provided the motor and gears; it's the assembly that flips the read head from one side of the disk to the other. Seorang pemain mati laser disk menyediakan motor dan gigi; itu majelis yang membalik kepala membaca dari satu sisi disk yang lain. A nice large solar panel allows the bot to run under reasonably bright indoor lighting, and the usual pair of photodiodes are tucked under the solar panel. Sebuah panel surya bagus besar memungkinkan bot untuk berjalan di bawah pencahayaan dalam ruangan cukup terang, dan pasangan biasa foto dioda yang terselip di bawah panel surya. The base is a chunk of steel that held the head magnets on a big old hard disk, and is heavy enough so that the whole thing doesn't fall over. dasar adalah sepotong baja yang memegang kepala magnet pada hard disk yang besar tua, dan cukup berat sehingga semuanya tidak jatuh.
The circuit is the basic power smart head circuit , with a Miller solar engine. Rangkaian ini merupakan dasar sirkuit smart power kepala , dengan mesin surya Miller. Since I was using a separate SE, I could gang two sets of three inverters each to drive the motor. Karena saya masih menggunakan SE terpisah, aku bisa geng dua set masing-masing tiga inverter untuk menggerakkan motor. I actually used a 74HCT240 by mistake (meant to use an HC240), but it seems to work pretty well anyway! Aku benar-benar menggunakan 74HCT240 oleh kesalahan (dimaksudkan untuk menggunakan HC240 an), tetapi tampaknya bekerja dengan baik pula!

 This a pummer that I built. Ini pummer yang saya dibangun. It's a dual LED pummer, based on a bicore circuit using a 74HCT240 chip. Ini adalah pummer dual LED, berdasarkan bicore sirkuit menggunakan chip 74HCT240. The circuit is described at the Solarbotics site (see schematic for a similar design that uses recharable batteries in place of the capacitor). Rangkaian ini dijelaskan di Solarbotics situs (lihat skematik untuk desain serupa yang menggunakan baterai recharable di tempat kapasitor).
This a pummer that I built. Ini pummer yang saya dibangun. It's a dual LED pummer, based on a bicore circuit using a 74HCT240 chip. Ini adalah pummer dual LED, berdasarkan bicore sirkuit menggunakan chip 74HCT240. The circuit is described at the Solarbotics site (see schematic for a similar design that uses recharable batteries in place of the capacitor). Rangkaian ini dijelaskan di Solarbotics situs (lihat skematik untuk desain serupa yang menggunakan baterai recharable di tempat kapasitor).
The frame of the pummer consists of three hard drive spacers; two for the base (a thin dark one on top of a larger aluminum one), and one placed vertically. Rangka pummer terdiri dari tiga spacer hard drive, dua untuk dasar (gelap tipis di atas aluminium yang lebih besar satu), dan satu ditempatkan vertikal. Both the HCT240 and the 1F storage capacitor just fit inside their respective rings, which inspired the design. Baik HCT240 dan penyimpanan 1F kapasitor hanya cocok di dalam cincin masing-masing, yang terinspirasi desain.
The LEDs are super-bright blue and green. The LED super terang biru dan hijau. Because these suck up a fair amount of juice, this pummer only runs for about an hour after dark. Karena ini menyedot cukup banyak jus, pummer ini hanya berlangsung selama sekitar satu jam setelah gelap.
 Here's my Solar Herbie. Berikut Herbie Solar saya. It's the standard Herbie circuit, with a Miller solar engine . Ini adalah sirkuit Herbie standar, dengan mesin surya Miller . The LM386 is tucked above the blue trim pot (I flattened the pins to make it sit flat). The LM386 ini persis berada di atas pot trim biru (saya rata pin untuk membuatnya duduk datar). The small motors are from laptop CD-ROM drives, and the solar engine is positioned between the motors and the capacitor. Motor kecil dari drive CD-ROM laptop, dan mesin surya diposisikan antara motor dan kapasitor.
Here's my Solar Herbie. Berikut Herbie Solar saya. It's the standard Herbie circuit, with a Miller solar engine . Ini adalah sirkuit Herbie standar, dengan mesin surya Miller . The LM386 is tucked above the blue trim pot (I flattened the pins to make it sit flat). The LM386 ini persis berada di atas pot trim biru (saya rata pin untuk membuatnya duduk datar). The small motors are from laptop CD-ROM drives, and the solar engine is positioned between the motors and the capacitor. Motor kecil dari drive CD-ROM laptop, dan mesin surya diposisikan antara motor dan kapasitor.
 I built this photopopper following Ray's FLED Photopopper Tutorial , but I mounted my gang of transistors upside-down so that it looks nicer from the bottom. Saya membangun photopopper ini menyusul Ray melarikan diri Photopopper Tutorial , tapi saya dipasang geng saya transistor terbalik sehingga terlihat lebih baik dari bawah. The results are quite pleasing, and this is quite an active little guy. Hasilnya cukup menyenangkan, dan ini cukup si kecil aktif. He's the first to start popping when the sun hits my robot collection. Dia yang pertama mulai bermunculan ketika matahari hits koleksi robot saya. The only problem is that he's liable to fall onto his arse; either the motors need to be placed further back, or there needs to be more weight towards the front. Satu-satunya masalah adalah bahwa dia bertanggung jawab untuk jatuh ke pantatnya, baik motor harus ditempatkan lebih ke belakang, atau ada perlu berat lebih ke arah depan. Oh, and I'll clean up those motor leads one of these days. Oh, dan aku akan membersihkan motor yang menyebabkan hari-hari ini.
I built this photopopper following Ray's FLED Photopopper Tutorial , but I mounted my gang of transistors upside-down so that it looks nicer from the bottom. Saya membangun photopopper ini menyusul Ray melarikan diri Photopopper Tutorial , tapi saya dipasang geng saya transistor terbalik sehingga terlihat lebih baik dari bawah. The results are quite pleasing, and this is quite an active little guy. Hasilnya cukup menyenangkan, dan ini cukup si kecil aktif. He's the first to start popping when the sun hits my robot collection. Dia yang pertama mulai bermunculan ketika matahari hits koleksi robot saya. The only problem is that he's liable to fall onto his arse; either the motors need to be placed further back, or there needs to be more weight towards the front. Satu-satunya masalah adalah bahwa dia bertanggung jawab untuk jatuh ke pantatnya, baik motor harus ditempatkan lebih ke belakang, atau ada perlu berat lebih ke arah depan. Oh, and I'll clean up those motor leads one of these days. Oh, dan aku akan membersihkan motor yang menyebabkan hari-hari ini.

 The challenge here was to to fit everything neatly under the solar panel. Tantangan di sini adalah segala sesuatu agar sesuai dengan rapi di bawah panel surya. This bot is quite active in sunlight, but doesn't seem to be very phototropic. Bot ini cukup aktif dalam sinar matahari, tetapi tidak terlihat sangat phototropic.
The challenge here was to to fit everything neatly under the solar panel. Tantangan di sini adalah segala sesuatu agar sesuai dengan rapi di bawah panel surya. This bot is quite active in sunlight, but doesn't seem to be very phototropic. Bot ini cukup aktif dalam sinar matahari, tetapi tidak terlihat sangat phototropic.
The result is a dual solar panel head, with no additional photodetectors. Hasilnya adalah kepala dual panel surya, tanpa photodetectors tambahan.

 Like my bare bones head , this robot uses an Omron floppy drive eject motor, with a base made from hard drive spindle motor parts. Seperti saya tulang kepala telanjang , robot ini menggunakan motor penggerak floppy eject Omron, dengan basis yang terbuat dari motor spindle hard drive bagian. The circuit is switched by a Miller Solar Engine , and there are two 3300µF storage capacitors under the solar panels. Rangkaian diaktifkan oleh Miller Solar Engine , dan ada dua 3300μF kapasitor penyimpanan di bawah panel surya. I used some salvaged surface mount components for the solar engine capacitor and diode, which make the SE nice and small, as shown in the second photograph. Saya menggunakan beberapa permukaan diselamatkan mount komponen untuk mesin surya kapasitor dan dioda, yang membuat SE bagus dan kecil, seperti terlihat pada foto kedua. The chip is a 74AC240. Chip adalah suatu 74AC240. A schematic is available . Skema yang tersedia .
Like my bare bones head , this robot uses an Omron floppy drive eject motor, with a base made from hard drive spindle motor parts. Seperti saya tulang kepala telanjang , robot ini menggunakan motor penggerak floppy eject Omron, dengan basis yang terbuat dari motor spindle hard drive bagian. The circuit is switched by a Miller Solar Engine , and there are two 3300µF storage capacitors under the solar panels. Rangkaian diaktifkan oleh Miller Solar Engine , dan ada dua 3300μF kapasitor penyimpanan di bawah panel surya. I used some salvaged surface mount components for the solar engine capacitor and diode, which make the SE nice and small, as shown in the second photograph. Saya menggunakan beberapa permukaan diselamatkan mount komponen untuk mesin surya kapasitor dan dioda, yang membuat SE bagus dan kecil, seperti terlihat pada foto kedua. The chip is a 74AC240. Chip adalah suatu 74AC240. A schematic is available . Skema yang tersedia .
 This is a bare-bones photo head which uses a 74AC240 IC, and two photodiodes as light detectors. Ini adalah foto kepala telanjang-tulang yang menggunakan IC 74AC240, dan dua dioda sebagai detektor cahaya. It's based on this schematic , which uses a Miller solar engine . Ini didasarkan pada skema ini , yang menggunakan mesin surya Miller . You can see the free-formed solar engine overhanging the front of the capacitor; the IC is hidden under the solar panel. Anda dapat melihat mesin surya bebas terbentuk menggantung bagian depan kapasitor, IC yang tersembunyi di bawah panel surya.
This is a bare-bones photo head which uses a 74AC240 IC, and two photodiodes as light detectors. Ini adalah foto kepala telanjang-tulang yang menggunakan IC 74AC240, dan dua dioda sebagai detektor cahaya. It's based on this schematic , which uses a Miller solar engine . Ini didasarkan pada skema ini , yang menggunakan mesin surya Miller . You can see the free-formed solar engine overhanging the front of the capacitor; the IC is hidden under the solar panel. Anda dapat melihat mesin surya bebas terbentuk menggantung bagian depan kapasitor, IC yang tersembunyi di bawah panel surya.
The motor is an Omron gear motor obtained from a Mac floppy drive (it's the motor that gives the Mac floppy drives their distinguishing feature—software eject). Motor adalah gigi Omron motor yang diperoleh dari Mac drive floppy (itu motor yang memberikan floppy drive Mac membedakan mereka mengeluarkan fitur-perangkat lunak). The base is made from parts of a hard drive motor. dasar ini terbuat dari bagian-bagian motor hard drive.
This little guy chatters every second or so in the sun. Ini si kecil chatters setiap detik atau lebih di bawah sinar matahari. It was my first well-functioning head, and I like the way it turned out. Ini pertama kali kepala saya berfungsi dengan baik, dan saya suka cara ternyata.
The core of the BEAMAnt is a 74AC240 chip wired as two coupled bicores . Inti dari BEAMAnt adalah sebuah chip 74AC240 kabel sebagai dua digabungkan bicores . The first “photo” bicore oscillates at a frequency and symmetry determined by the light falling on the photodiodes—slow in low light, and faster in bright light. Yang pertama "foto" bicore berosilasi pada frekuensi dan simetri ditentukan oleh cahaya yang jatuh pada dioda-lambat dalam cahaya rendah, dan lebih cepat dalam cahaya terang. The second “motor” bicore generates a basic left/right oscillation that is used to alternate the motors. Yang kedua "motor" bicore menghasilkan kiri dasar / osilasi kanan yang digunakan untuk alternatif motor. The two bicores are coupled by resistors, which can lead to complex interactions between them. Kedua bicores yang digabungkan oleh resistor, yang dapat mengakibatkan interaksi yang kompleks antara mereka. The circuit has two tactile sensors, which temporarily reverse the polarity of the motor on the other side. Rangkaian ini memiliki dua sensor sentuhan, yang sementara membalikkan polaritas motor di sisi lain. This allows the bot to turn away from obstacles. Hal ini memungkinkan bot untuk berpaling dari rintangan.
 This BEAMAnt is based on two small gear motors ( Solarbotics GM15 ) on a bent paperclip frame. BEAMAnt ini didasarkan pada dua motor roda gigi kecil ( Solarbotics GM15 ) pada bingkai penjepit kertas bengkok. I solarized the circuit with a Miller solar engine, which you can see hanging off the back in the “under the hood” shot below. Aku solarized rangkaian dengan mesin Miller surya, yang dapat Anda lihat tergantung dari belakang dalam "di bawah tenda" ditembak di bawah ini. Most of the circuit is free-formed around the '240 IC; the two photodiodes sit underneath the front corners of the solar cell, and the 0.047F capacitor acts as a nose. Sebagian besar rangkaian bebas-terbentuk di sekitar IC '240, dua dioda duduk di bawah sudut depan sel surya, dan tindakan kapasitor 0.047F sebagai hidung.
This BEAMAnt is based on two small gear motors ( Solarbotics GM15 ) on a bent paperclip frame. BEAMAnt ini didasarkan pada dua motor roda gigi kecil ( Solarbotics GM15 ) pada bingkai penjepit kertas bengkok. I solarized the circuit with a Miller solar engine, which you can see hanging off the back in the “under the hood” shot below. Aku solarized rangkaian dengan mesin Miller surya, yang dapat Anda lihat tergantung dari belakang dalam "di bawah tenda" ditembak di bawah ini. Most of the circuit is free-formed around the '240 IC; the two photodiodes sit underneath the front corners of the solar cell, and the 0.047F capacitor acts as a nose. Sebagian besar rangkaian bebas-terbentuk di sekitar IC '240, dua dioda duduk di bawah sudut depan sel surya, dan tindakan kapasitor 0.047F sebagai hidung.
 Initially, the bot just scooted forward on a skid made from the bent paperclip. Awalnya, bot hanya berlari maju pada skid terbuat dari penjepit kertas bengkok. However, on anything other than a very smooth surface, the bot wasn't able to turn around. Namun, pada apa pun selain permukaan yang sangat halus, bot tidak bisa berbalik. I solved this by hot-glueing a small bearing from a floppy drive stepper motor over the skid. Aku memecahkan ini dengan panas-pengeleman sebuah bantalan kecil dari motor stepper floppy drive atas selip itu.
Initially, the bot just scooted forward on a skid made from the bent paperclip. Awalnya, bot hanya berlari maju pada skid terbuat dari penjepit kertas bengkok. However, on anything other than a very smooth surface, the bot wasn't able to turn around. Namun, pada apa pun selain permukaan yang sangat halus, bot tidak bisa berbalik. I solved this by hot-glueing a small bearing from a floppy drive stepper motor over the skid. Aku memecahkan ini dengan panas-pengeleman sebuah bantalan kecil dari motor stepper floppy drive atas selip itu.
This bot has impressive phototactic abilities. Bot ini memiliki kemampuan phototactic mengesankan. If the light source is off to the side, it will turn on its axis until it's facing the light, and then head straight towards it. Jika sumber cahaya ke samping, itu akan menyala pada porosnya sampai menghadap cahaya, dan kemudian langsung menuju ke arah itu. Obstacle avoidance could use a bit of tuning; the sensor timers capacitors don't work very well in a solar-driven bot, because the power keeps dropping away. penghindaran Kendala bisa menggunakan sedikit tuning; timer sensor kapasitor tidak bekerja sangat baik dalam sebuah-surya didorong bot, karena kekuasaan terus menjatuhkan diri.


Free Template Blogger collection template Hot Deals SEO
BEAM ROBOT
Power-Smart Kepala 3 Versi
It's been a while since I've built any BEAM robots, but some wet weather prompted me to get back to the soldering iron and make a new bot. Sudah beberapa saat sejak aku telah membangun apapun BEAM robot, tetapi beberapa cuaca basah mendorong saya untuk kembali ke besi solder dan membuat bot baru.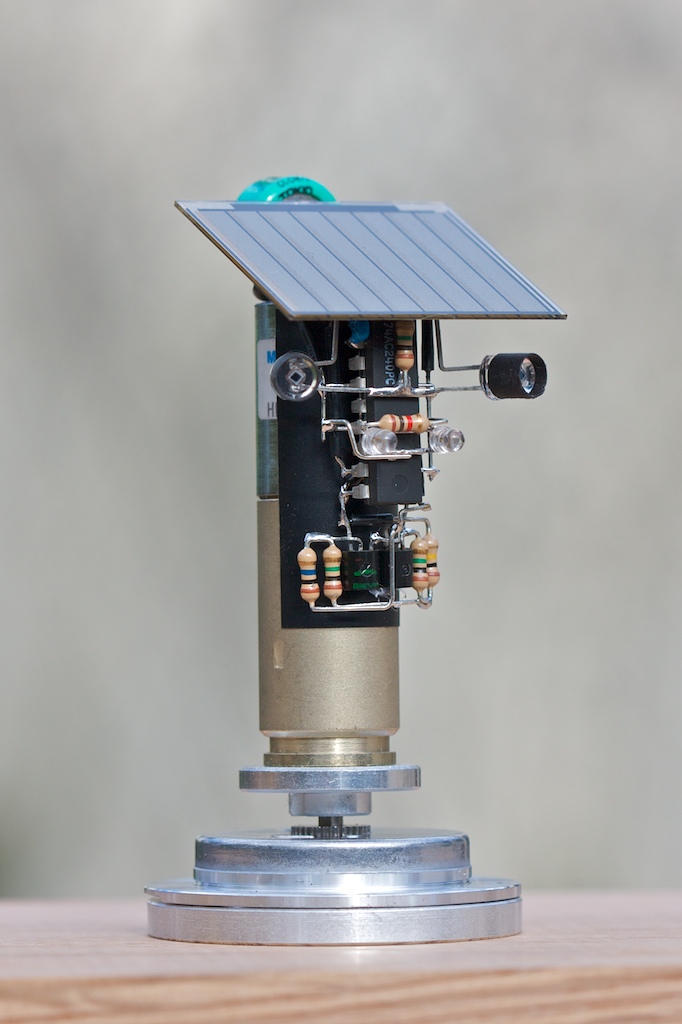 This is another solar powered “power-smart” head, built around a 74AC240 chip. Ini adalah satu lagi tenaga surya "kekuatan-pintar" kepala, dibangun di sekitar chip 74AC240. The circuit is the Solar Power Smart Head circuit . sirkuit adalah Solar Power Smart Kepala sirkuit . The motor is a nice geared 141:1 MicroMo motor I got off Ebay. Motor adalah ditujukan bagus 141:1 MicroMo motor saya turun dari Ebay. It has a cog attached to the spindle, which allowed me to mount it in a drilled-out hard drive part for the base. Memiliki gigi yang melekat pada mesin, yang memungkinkan saya untuk me-mount di bagian drive dibor-out sulit bagi dasar.
This is another solar powered “power-smart” head, built around a 74AC240 chip. Ini adalah satu lagi tenaga surya "kekuatan-pintar" kepala, dibangun di sekitar chip 74AC240. The circuit is the Solar Power Smart Head circuit . sirkuit adalah Solar Power Smart Kepala sirkuit . The motor is a nice geared 141:1 MicroMo motor I got off Ebay. Motor adalah ditujukan bagus 141:1 MicroMo motor saya turun dari Ebay. It has a cog attached to the spindle, which allowed me to mount it in a drilled-out hard drive part for the base. Memiliki gigi yang melekat pada mesin, yang memungkinkan saya untuk me-mount di bagian drive dibor-out sulit bagi dasar. This guy fires every few seconds under bright light, and almost continuously in daylight, rotating quite quickly, and smoothly to point towards the brightest part of the environment. Orang ini kebakaran setiap beberapa detik di bawah cahaya terang, dan hampir terus menerus di siang hari, berputar cukup cepat, dan lancar ke titik menuju bagian terang dari lingkungan. I'm pleased with it. Saya senang dengan itu.
Symet Symet
The Symet use one of the simplest BEAM circuits. Yang Symet menggunakan salah satu sirkuit BALOK sederhana. The solar cell charges the capacitors (one or more in parallel). Sel surya biaya kapasitor (satu atau lebih secara paralel). A solar engine circuit monitors the voltage, and when it trips power is dumped through the motor. Sebuah sirkuit mesin surya monitor tegangan, dan ketika perjalanan daya dibuang melalui motor. Symets rest on their motor spindle, and scoot long the ground when the motor spins. istirahat Symets pada poros motor mereka, dan bergeser panjang tanah ketika motor berputar. When they hit something, they tilt onto another axis, and go off in a different direction. Ketika mereka menemukan sesuatu, mereka kemiringan ke sumbu lain, dan pergi ke arah yang berbeda. This is one of the first free-formed BEAM bots that I built. Ini adalah salah satu bot pertama BALOK bebas terbentuk yang saya dibangun. The circuit is a 1381-based solar engine circuit, and is built around the motor, with components placed radially around a central axis. Rangkaian ini adalah berbasis surya mesin 1381 sirkuit, dan dibangun di sekitar motor, dengan komponen ditempatkan radial di sekitar sumbu pusat. I used a platter from a laptop hard drive as the bumper. Saya menggunakan piring dari hard drive laptop sebagai bumper. The trick with symets is to get the angle relative to the ground and the spindle ground contact right so that the symet moves in a straight line until it hits something. Trik dengan symets adalah untuk mendapatkan sudut relatif terhadap tanah dan kontak tanah gelendong kanan sehingga symet bergerak dalam garis lurus sampai hits sesuatu. I failed with this one, but it jiggers around in circles quite happily. Aku gagal dengan yang satu ini, tapi jiggers berputar-putar cukup gembira. I also learnt that hot-glue solidifies instantly when it comes into contact with cold metal. Saya juga belajar bahwa panas-lem membeku seketika ketika datang ke dalam kontak dengan logam dingin. Either use the tip of the hot glue gun to heat the metal before glueing, or use epoxy. Entah menggunakan ujung pistol lem panas untuk memanaskan logam sebelum pengeleman, atau menggunakan epoxy.
Turbot Turbot
Turbots are BEAM bots that move by spinning flagella, causing them to tumble across the floor. Turbots adalah bot BALOK yang bergerak dengan flagella pemintalan, menyebabkan mereka jatuh di lantai. The simplest are just motors driven by a solar engine, and have no directional ability; these are commonly known as a turmets. Yang paling sederhana hanya motor digerakkan oleh mesin surya, dan tidak memiliki kemampuan arah; ini umumnya dikenal sebagai turmets. More complex turbots can move towards the light, reverse their motors to get out of tangles, and other things. Lebih turbots kompleks dapat bergerak menuju cahaya, sebaliknya motor mereka untuk keluar dari kabel, dan hal-hal lain.I played for a while with several turbot circuits, particularly those by J Wolfgang Goerlich (who has an excellent series of pages on various turbot designs ). Saya bermain untuk sementara waktu dengan sirkuit beberapa turbot, terutama oleh J Wolfgang Goerlich (yang memiliki seri yang sangat baik halaman di desain berbagai turbot ). His Scuff turbot looked particularly promising, as it was solar powered, and had phototactic behavior. Nya turbot lecet tampak sangat menjanjikan, seperti yang bertenaga surya, dan memiliki perilaku phototactic.
However, I was also wanted to build a bot whose workings fitted neatly between two solar cells. Namun, saya juga ingin membangun bot kerja yang dipasang rapi antara dua sel surya. That dictated the body shape (rectangular), which severely limited the behavior, since it's hard to get turning if the axis of rotation for both flagella is the same. Yang mendikte bentuk tubuh (persegi panjang), yang sangat terbatas perilaku, karena sulit untuk mendapatkan balik jika sumbu rotasi untuk flagela keduanya adalah sama. But I wanted something slightly more complex than a single-motor turbot. Tapi aku ingin sesuatu yang sedikit lebih kompleks daripada turbot tunggal motor.
 The circuit I came up with is a simple modification of a 74AC240-based photovore design (but I wish I'd seen Wilf's caveat about this circuit first!). Rangkaian ini saya datang dengan merupakan modifikasi sederhana dari sebuah photovore berdasarkan desain-74AC240 (tapi aku berharap aku melihat Wilf's peringatan tentang hal ini rangkaian pertama!). First, it's solarized with a Miller solar engine . Pertama, itu solarized dengan mesin surya Miller . Secondly, I wanted the circuit to choose which motor to drive based on which solar cell was getting more light (ie the bot knows which way is “up”). Kedua, saya ingin sirkuit untuk memilih motor untuk drive berdasarkan yang sel surya mendapatkan cahaya lebih (yaitu bot yang tahu cara adalah "up"). Since the bot has two solar cells, I could replace the photodiode voltage divider in that circuit with the solar cells themselves, by taking a reference voltage from between the two cells (which are wired in series), via a large resitor. Karena bot memiliki dua sel surya, aku bisa mengganti pembagi tegangan photodiode di sirkuit yang dengan sel surya sendiri, dengan mengambil tegangan referensi dari antara dua sel (yang kabel dalam seri), melalui resitor besar. Reverse-biased Schottky diodes across each solar cell ensure that the unlit cell doesn't limit the charging current. Reverse-bias dioda Schottky di setiap sel surya memastikan bahwa sel gelap tidak membatasi arus pengisian.
The circuit I came up with is a simple modification of a 74AC240-based photovore design (but I wish I'd seen Wilf's caveat about this circuit first!). Rangkaian ini saya datang dengan merupakan modifikasi sederhana dari sebuah photovore berdasarkan desain-74AC240 (tapi aku berharap aku melihat Wilf's peringatan tentang hal ini rangkaian pertama!). First, it's solarized with a Miller solar engine . Pertama, itu solarized dengan mesin surya Miller . Secondly, I wanted the circuit to choose which motor to drive based on which solar cell was getting more light (ie the bot knows which way is “up”). Kedua, saya ingin sirkuit untuk memilih motor untuk drive berdasarkan yang sel surya mendapatkan cahaya lebih (yaitu bot yang tahu cara adalah "up"). Since the bot has two solar cells, I could replace the photodiode voltage divider in that circuit with the solar cells themselves, by taking a reference voltage from between the two cells (which are wired in series), via a large resitor. Karena bot memiliki dua sel surya, aku bisa mengganti pembagi tegangan photodiode di sirkuit yang dengan sel surya sendiri, dengan mengambil tegangan referensi dari antara dua sel (yang kabel dalam seri), melalui resitor besar. Reverse-biased Schottky diodes across each solar cell ensure that the unlit cell doesn't limit the charging current. Reverse-bias dioda Schottky di setiap sel surya memastikan bahwa sel gelap tidak membatasi arus pengisian. {kind=link}
The innards of this beast are shown below. Jeroan dari binatang ini ditunjukkan di bawah ini. It's pretty tightly packed! It's pretty padat! (Click the image for a larger view.) (Klik gambar untuk tampilan yang lebih besar.)
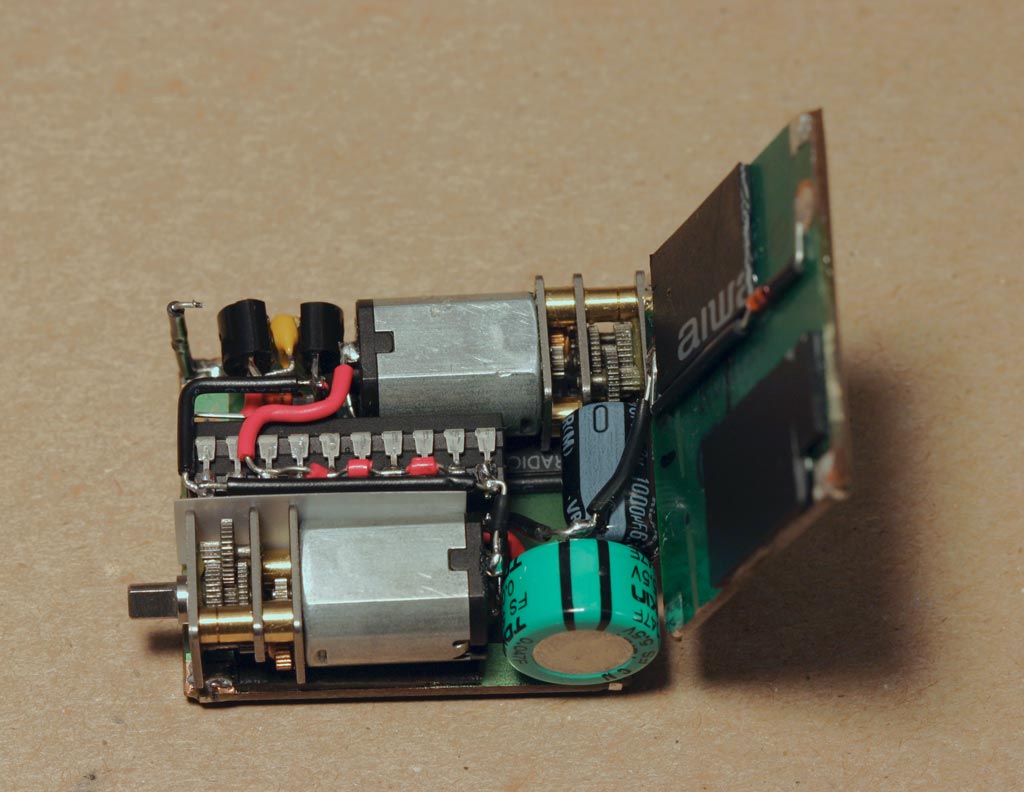 You can see the Miller SE in the top-left corner. Anda dapat melihat SE Miller di pojok kiri. There are two 74AC240s: doubled-up to increase the drive current for the motors. Ada dua 74AC240s: dua kali lipat-up untuk meningkatkan drive saat ini untuk motor. The main storage capacitor is 0.047F; on its own, it can't dump enough current to reliably start up the gearmotors (which are GM11s from Solarbotics ), so there's another 1000µF capacitor in parallel to get things going. Penyimpanan utama kapasitor adalah 0.047F; sendiri, tidak dapat dump cukup saat ini untuk memulai andal yang gearmotors (yang GM11s dari Solarbotics ), jadi ada kapasitor lain 1000μF secara paralel untuk mendapatkan hal yang terjadi. The whole thing is epoxied together, with some scrap plastic spacers to allow the gears to clear the solder pads on the solar cells. Seluruh hal yang epoxied bersama-sama, dengan beberapa spacer scrap plastik untuk memungkinkan roda gigi untuk membersihkan bantalan solder pada sel surya.
You can see the Miller SE in the top-left corner. Anda dapat melihat SE Miller di pojok kiri. There are two 74AC240s: doubled-up to increase the drive current for the motors. Ada dua 74AC240s: dua kali lipat-up untuk meningkatkan drive saat ini untuk motor. The main storage capacitor is 0.047F; on its own, it can't dump enough current to reliably start up the gearmotors (which are GM11s from Solarbotics ), so there's another 1000µF capacitor in parallel to get things going. Penyimpanan utama kapasitor adalah 0.047F; sendiri, tidak dapat dump cukup saat ini untuk memulai andal yang gearmotors (yang GM11s dari Solarbotics ), jadi ada kapasitor lain 1000μF secara paralel untuk mendapatkan hal yang terjadi. The whole thing is epoxied together, with some scrap plastic spacers to allow the gears to clear the solder pads on the solar cells. Seluruh hal yang epoxied bersama-sama, dengan beberapa spacer scrap plastik untuk memungkinkan roda gigi untuk membersihkan bantalan solder pada sel surya. This guy is pretty active in bright light, churning his way in straight line. Orang ini cukup aktif dalam cahaya terang, cara berputar di garis lurus. It has a few issues, like it can end up balanced on one end, with neither cell getting much light (which could be fixed by adding some bumps to make it topple over), and the legs can hit each other. Ini memiliki beberapa masalah, seperti itu akhirnya dapat seimbang pada salah satu ujungnya, dengan sel tidak mendapatkan banyak cahaya (yang dapat diperbaiki dengan menambahkan beberapa benjolan untuk membuatnya menjatuhkan atas), serta kaki bisa memukul satu sama lain. But the compact construction appeals to me. Tetapi banding konstruksi kompak kepada saya.
Solar Power-Smart Head Solar Power-Smart Kepala
I experimented with a number of power-smart head circuits on the breadboard, but none seemed as simple and reliable as the bare-bones photo head . Aku bereksperimen dengan sejumlah kepala pintar sirkuit-listrik pada papan tempat memotong roti, tetapi tidak ada tampak yang sederhana dan dapat diandalkan sebagai tulang kepala-foto telanjang . However, I wanted to try one of the power-smart heads, so went ahead and built this one. Namun, saya ingin mencoba salah satu kepala kekuasaan-pintar, jadi pergi ke depan dan membangun satu ini. This is a solarized power-smart head . Ini adalah power head-smart solarized . It's based on a 74AC240, with two storage capacitors (the big silver cylinders), and photodiodes for “eyes”. Ini didasarkan pada 74AC240, dengan dua kapasitor penyimpanan (silinder perak besar), dan foto dioda untuk "mata". The solar engine is free-formed to lie over the IC. Mesin matahari bebas-dibentuk untuk berbohong atas IC. The motor is a Nihon gear motor from a lens assembly (courtesy of Fair Radio Sales ), epoxied into a base made from hard drive motor parts. Motor merupakan alat Nihon motor dari perakitan lensa (courtesy of Radio Sales Fair ), epoxied menjadi dasar terbuat dari bagian-bagian motor hard drive.
This is a solarized power-smart head . Ini adalah power head-smart solarized . It's based on a 74AC240, with two storage capacitors (the big silver cylinders), and photodiodes for “eyes”. Ini didasarkan pada 74AC240, dengan dua kapasitor penyimpanan (silinder perak besar), dan foto dioda untuk "mata". The solar engine is free-formed to lie over the IC. Mesin matahari bebas-dibentuk untuk berbohong atas IC. The motor is a Nihon gear motor from a lens assembly (courtesy of Fair Radio Sales ), epoxied into a base made from hard drive motor parts. Motor merupakan alat Nihon motor dari perakitan lensa (courtesy of Radio Sales Fair ), epoxied menjadi dasar terbuat dari bagian-bagian motor hard drive. This head works pretty well, but looks a bit ugly. kepala ini bekerja dengan cukup baik, namun tampak agak jelek. It's harder to position the components around the cylindrical motor than the nice cuboidal Omron units. Lebih sulit untuk posisi komponen di sekitar motor silinder dari unit bagus Omron cuboidal.
Spinner Pemintal
 The spinner is a very simple bot that simply charges up the capacity (the green squat cylinder in the image) via the solar panel, which then discharges through the motor when a certain voltage is reached. pemintal adalah sangat sederhana bot bahwa hanya biaya sampai kapasitas (silinder jongkok hijau pada gambar) melalui panel surya, yang kemudian pembuangan melalui motor ketika tegangan tertentu tercapai. This is exactly the same circuit as the symet (with some adjustment of component values), but the bot is configured “standing on its head” so that the head spins around when the motor fires. Ini adalah sirkuit yang sama persis dengan symet (dengan beberapa penyesuaian nilai komponen), tetapi bot dikonfigurasi "berdiri di atas kepala" sehingga kepala berputar ketika kebakaran motor.
The spinner is a very simple bot that simply charges up the capacity (the green squat cylinder in the image) via the solar panel, which then discharges through the motor when a certain voltage is reached. pemintal adalah sangat sederhana bot bahwa hanya biaya sampai kapasitas (silinder jongkok hijau pada gambar) melalui panel surya, yang kemudian pembuangan melalui motor ketika tegangan tertentu tercapai. This is exactly the same circuit as the symet (with some adjustment of component values), but the bot is configured “standing on its head” so that the head spins around when the motor fires. Ini adalah sirkuit yang sama persis dengan symet (dengan beberapa penyesuaian nilai komponen), tetapi bot dikonfigurasi "berdiri di atas kepala" sehingga kepala berputar ketika kebakaran motor.  This was a fairly easy robot to build. Ini adalah robot cukup mudah untuk membangun. One thing to be aware of is that when you have your circuit on the breadboard, running a motor with no load, the motor will spin for much longer than it does under load. Satu hal yang harus diperhatikan adalah bahwa ketika Anda memiliki sirkuit Anda pada papan tempat memotong roti tersebut, menjalankan motor tanpa beban, motor akan berputar lebih lama dari itu tidak di bawah beban. I had to retrofit a larger timing capacitor on the Miller engine to have this guy spin for a reasonable amount of time on each charge. Aku harus retrofit sebuah waktu yang lebih besar kapasitor pada mesin Miller untuk memiliki spin pria untuk jumlah waktu yang wajar pada setiap biaya. You can see the solar engine here: Anda dapat melihat mesin surya di sini:
This was a fairly easy robot to build. Ini adalah robot cukup mudah untuk membangun. One thing to be aware of is that when you have your circuit on the breadboard, running a motor with no load, the motor will spin for much longer than it does under load. Satu hal yang harus diperhatikan adalah bahwa ketika Anda memiliki sirkuit Anda pada papan tempat memotong roti tersebut, menjalankan motor tanpa beban, motor akan berputar lebih lama dari itu tidak di bawah beban. I had to retrofit a larger timing capacitor on the Miller engine to have this guy spin for a reasonable amount of time on each charge. Aku harus retrofit sebuah waktu yang lebih besar kapasitor pada mesin Miller untuk memiliki spin pria untuk jumlah waktu yang wajar pada setiap biaya. You can see the solar engine here: Anda dapat melihat mesin surya di sini: The copper loops are actually large C-clips from some large (projector or copier) lens assemblies, hot-glued onto the motor body, and soldered to eachother. Loop tembaga sebenarnya besar C-klip dari beberapa (proyektor atau mesin fotokopi) besar majelis lensa, panas menempel ke tubuh motor, dan disolder ke eachother.
Solar Head Solar Kepala
 This is my third attempt at a solar head, again using a Nihon gear motor like my second one . Ini adalah usaha ketiga saya di kepala surya, kembali menggunakan motor gear Nihon seperti saya satu detik . I was trying to improve the aesthetic, as well as experimenting with the Power Smart Head Version 3 circuit . Aku sedang berusaha untuk memperbaiki estetika, serta bereksperimen dengan Kepala Smart Versi 3 sirkuit Power . I couldn't get the latching SE to work very well in that circuit, so I modified the circuit to use a standard Miller solar engine, and was thus able to use the spare inverters to help drive the motor. Aku tidak bisa mendapatkan SE latching untuk bekerja sangat baik di sirkuit itu, jadi saya memodifikasi sirkuit untuk menggunakan mesin standar Miller surya, dan dengan demikian dapat menggunakan inverter cadangan untuk membantu mendorong motor.
This is my third attempt at a solar head, again using a Nihon gear motor like my second one . Ini adalah usaha ketiga saya di kepala surya, kembali menggunakan motor gear Nihon seperti saya satu detik . I was trying to improve the aesthetic, as well as experimenting with the Power Smart Head Version 3 circuit . Aku sedang berusaha untuk memperbaiki estetika, serta bereksperimen dengan Kepala Smart Versi 3 sirkuit Power . I couldn't get the latching SE to work very well in that circuit, so I modified the circuit to use a standard Miller solar engine, and was thus able to use the spare inverters to help drive the motor. Aku tidak bisa mendapatkan SE latching untuk bekerja sangat baik di sirkuit itu, jadi saya memodifikasi sirkuit untuk menggunakan mesin standar Miller surya, dan dengan demikian dapat menggunakan inverter cadangan untuk membantu mendorong motor. Unfortunately, this beast needs very bright light to work well, so it needs direct sunlight to perform at its best. Sayangnya, binatang ini perlu cahaya yang sangat terang untuk bekerja dengan baik, sehingga perlu sinar matahari langsung untuk melakukan yang terbaik. I might try it with a lower voltage trigger at some point. Saya mungkin akan mencoba dengan pemicu tegangan lebih rendah di beberapa titik.
Roller Rol
This bot is my first experiment with flexible solar cells . Bot ini adalah eksperimen pertama saya dengan sel surya fleksibel . Although not as efficient as the cells used in most BEAM bots, the flexibility of these cells allows for some novel bot configurations. Meskipun tidak seefisien sel-sel yang digunakan dalam sebagian besar BEAM bots, fleksibilitas sel-sel ini memungkinkan untuk novel beberapa bot konfigurasi.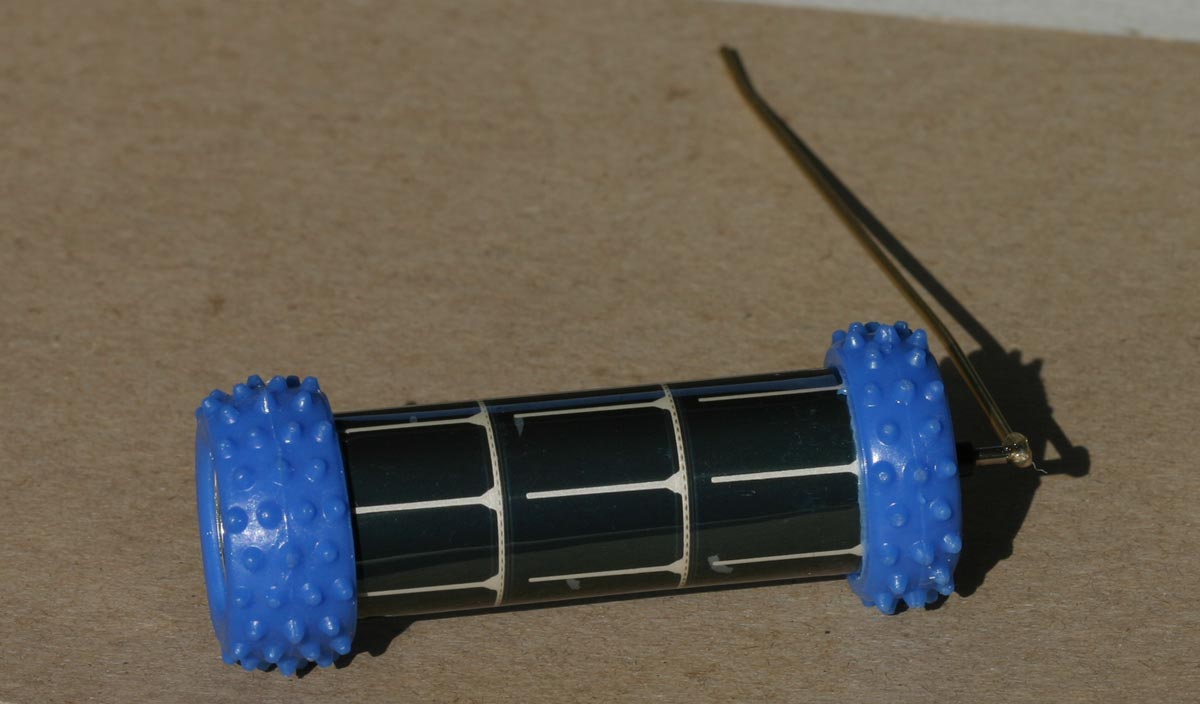 The bot is a simple solar roller , driven by a Miller solar engine . Bot adalah sederhana roller matahari , didorong oleh surya mesin Miller . The arm is attached to the spindle of an efficient gear motor, and there's a 0.047F storage capacitor inside. lengan melekat ke sumbu dari sebuah motor gigi efisien, dan ada di dalam penyimpanan 0.047F kapasitor. The flexible solar cell is wrapped around two toy wheels, one of which has its center removed for the motor. Sel surya fleksibel melilit dua roda mainan, salah satunya memiliki pusat dikeluarkan untuk motor. The goofy rubber tires fit over the ends. Ban karet konyol pas di atas berakhir. You can see the bot's innards here . Anda dapat melihat bot's jeroan di sini .
The bot is a simple solar roller , driven by a Miller solar engine . Bot adalah sederhana roller matahari , didorong oleh surya mesin Miller . The arm is attached to the spindle of an efficient gear motor, and there's a 0.047F storage capacitor inside. lengan melekat ke sumbu dari sebuah motor gigi efisien, dan ada di dalam penyimpanan 0.047F kapasitor. The flexible solar cell is wrapped around two toy wheels, one of which has its center removed for the motor. Sel surya fleksibel melilit dua roda mainan, salah satunya memiliki pusat dikeluarkan untuk motor. The goofy rubber tires fit over the ends. Ban karet konyol pas di atas berakhir. You can see the bot's innards here . Anda dapat melihat bot's jeroan di sini . {kind=link}
In full sunlight, this bot fires every few seconds, which more often than I thought it would given that only a proportion of the cell is getting direct light. Dalam sinar matahari penuh, bot ini kebakaran setiap beberapa detik, yang lebih sering daripada yang saya pikir akan mengingat bahwa hanya sebagian sel semakin cahaya langsung. It can also clamber over low obstacles. Hal ini juga dapat memanjat rintangan rendah.
Solar Photopopper Solar Photopopper
The Bare Bones photovore is a beautifully simple circuit that makes use of the fact that the switching voltage of the inverter inputs on the 74AC240 is roughly half the supply voltage. The Bare Bones photovore adalah sederhana sirkuit indah yang membuat penggunaan fakta bahwa switching tegangan masukan inverter pada 74AC240 adalah kira-kira setengah dari tegangan suplai. The circuit uses a pair of photodiodes as a voltage divider. Rangkaian menggunakan sepasang dioda sebagai pembagi tegangan. The mid point of the divider is converted to a “high” or “low” signal by the inverter, which is used to determine which of two motors to run. Titik pertengahan divider dikonversikan ke sinyal "tinggi" atau "rendah" oleh inverter, yang digunakan untuk menentukan dua motor untuk menjalankan.I've been toying with the idea for a while of using two solar panels in place of the photodiodes, and simply taking a mid-point voltage reference to figure out which panel is getting more light. Aku sudah bermain-main dengan ide untuk sementara menggunakan dua panel surya di tempat foto dioda, dan hanya mengambil referensi tegangan titik tengah untuk mencari tahu mana panel semakin lebih ringan. Then, given the appropriate configuration of solar panels and motor wiring, it should be easy to make a bot that heads towards the light with no photodiodes. Kemudian, mengingat konfigurasi panel surya yang tepat dan kabel motor, harus mudah untuk membuat bot bahwa kepala terhadap cahaya tanpa foto dioda. This is the result (with schematic this time!). Ini adalah hasil (dengan skema waktu ini!).
{kind=link}

 Its body is the 74AC240 chip, with a capacitor abdomen. Tubuhnya adalah chip 74AC240, dengan perut kapasitor. The head is the Miller solar engine , which uses a couple of surface mount components; an old SMT diode, and a tiny capacitor, both salvaged from old circuit boards: Kepala adalah matahari mesin Miller , yang menggunakan beberapa mount permukaan komponen, sebuah dioda SMT tua, dan sebuah kapasitor kecil, baik diselamatkan dari papan sirkuit lama:
Its body is the 74AC240 chip, with a capacitor abdomen. Tubuhnya adalah chip 74AC240, dengan perut kapasitor. The head is the Miller solar engine , which uses a couple of surface mount components; an old SMT diode, and a tiny capacitor, both salvaged from old circuit boards: Kepala adalah matahari mesin Miller , yang menggunakan beberapa mount permukaan komponen, sebuah dioda SMT tua, dan sebuah kapasitor kecil, baik diselamatkan dari papan sirkuit lama:  This guy works well. Orang ini bekerja dengan baik. It's a little slow to pop if the light is only hitting one panel, but takes very few pops to orient itself towards the light. Ini agak lambat untuk pop jika cahaya hanya memukul satu panel, tetapi mengambil sangat sedikit muncul untuk mengarahkan diri menuju cahaya. Once both panels are getting equal illumination, both motors pop and it goes forwards. Setelah kedua panel mendapatkan pencahayaan yang sama, baik motor pop dan ia pergi ke depan.
This guy works well. Orang ini bekerja dengan baik. It's a little slow to pop if the light is only hitting one panel, but takes very few pops to orient itself towards the light. Ini agak lambat untuk pop jika cahaya hanya memukul satu panel, tetapi mengambil sangat sedikit muncul untuk mengarahkan diri menuju cahaya. Once both panels are getting equal illumination, both motors pop and it goes forwards. Setelah kedua panel mendapatkan pencahayaan yang sama, baik motor pop dan ia pergi ke depan. BEAM robots BEAM robot
BEAM robots are simple, small robots whose behaviors are inspired by biological phenomena. BEAM robot sederhana, robot kecil yang perilaku terinspirasi oleh fenomena biologis. They are largely the brain-child of Mark Tilden , who developed most of the core circuits. Mereka adalah sebagian besar otak-anak Mark Tilden , yang mengembangkan sebagian besar sirkuit inti. They use commonly available electronic components, including some analog ICs, and most are solar powered. Mereka menggunakan komponen elektronik yang umum tersedia, termasuk beberapa IC analog, dan sebagian besar bertenaga surya. BEAM is an acronym for “Biology, Electronics, Aesthetics, and Mechanics”, which describes the major influences on BEAM robot designs. BEAM adalah singkatan dari "Biology, Electronics, Estetika, dan Mekanika", yang menggambarkan pengaruh utama pada desain robot BALOK.
BEAM is an acronym for “Biology, Electronics, Aesthetics, and Mechanics”, which describes the major influences on BEAM robot designs. BEAM adalah singkatan dari "Biology, Electronics, Estetika, dan Mekanika", yang menggambarkan pengaruh utama pada desain robot BALOK. Magbot Spinner Magbot Spinner
The magbot circuit is neat little circuit that dumps power through a coil in order to produce motion. The rangkaian magbot adalah sirkuit kecil yang rapi yang kotor dan penuh kekuasaan melalui kumparan untuk menghasilkan gerak. It's the basis for the Solarbotics SunSwinger pendulum kit , and various “sun dancer” kits. Ini adalah dasar bagi Solarbotics kit pendulum SunSwinger , dan berbagai "matahari penari" kit.{kind=link}
I wanted to make a bot with this circuit that could swing a full 360°, using some hard drive magnets and the Solarbotics “ Major Henry ” coil. Saya ingin membuat bot dengan sirkuit yang bisa ayunan 360 ° penuh, menggunakan beberapa magnet hard drive dan Solarbotics " Mayor Henry "coil. My first attempt used a stripped CD-ROM motor for the axle, but that had too much damping (even after removing the magnets). upaya pertama saya menggunakan CD-ROM motor dilucuti untuk as roda, tetapi itu terlalu banyak redaman (bahkan setelah mengeluarkan magnet). I ended up using a VCR pinch roller, which has a very free-rotating bearing (but had to be laboriously stripped of its rubber wheel). Saya akhirnya menggunakan roller VCR sejumput, yang memiliki dampak yang sangat bebas berputar (tapi harus susah payah ditelanjangi roda karet).
I was lucky to find a hard drive magnet pair in a frame, from an older hard drive. Aku cukup beruntung menemukan magnet sepasang hard drive dalam bingkai, dari hard drive yang lebih tua. The vertical chassis is from an old VCR. Casing vertikal dari VCR tua. The body of the rotating part is a hard drive head mechanism, which happened to fit nicely over the pinch roller hub. Tubuh adalah bagian yang berputar kepala mekanisme hard drive, yang terjadi agar sesuai dengan baik selama hub roller mencubit. The circuit is mounted on this arm, with some care taken to balance it so that the arm can swing all the way around given enough force. Rangkaian ini dipasang pada lengan ini, dengan beberapa perawatan diambil untuk menyeimbangkannya sehingga lengan bisa swing semua jalan di sekitar kekuatan yang cukup diberikan.

 This is a fun bot to watch. Ini menyenangkan bot untuk menonton. In bright light, it starts swinging almost immediately, and after a few swings just makes it to the top, then over. Dalam cahaya terang, mulai berayun hampir segera, dan setelah beberapa ayunan hanya membuat ke atas, kemudian berakhir. After that it'll keep rotating all the way around. Setelah itu akan terus berputar sepanjang jalan sekitar.
This is a fun bot to watch. Ini menyenangkan bot untuk menonton. In bright light, it starts swinging almost immediately, and after a few swings just makes it to the top, then over. Dalam cahaya terang, mulai berayun hampir segera, dan setelah beberapa ayunan hanya membuat ke atas, kemudian berakhir. After that it'll keep rotating all the way around. Setelah itu akan terus berputar sepanjang jalan sekitar. Power-Smart Head Version 2 Power-Smart Kepala Versi 2
After re-reading Wilf's BEAM Heads 101 I had the urge to make another head. Setelah membaca kembali Wilf's BALOK 101 Kepala saya memiliki keinginan untuk membuat kepala lain. I also wanted it to have more “presence” that my previous heads, which meant that it had to be more obvious when it turned around, and hence less symmetrical. Saya juga ingin untuk memiliki lebih "kehadiran" bahwa kepala saya sebelumnya, yang berarti bahwa itu harus lebih jelas ketika berbalik, dan karena itu kurang simetris. I happened to have some parts lying around that I could use to make such a bot. Saya kebetulan punya beberapa bagian berbaring sekitar bahwa aku bisa gunakan untuk membuat seperti bot. A defunct laser disk player provided the motor and gears; it's the assembly that flips the read head from one side of the disk to the other. Seorang pemain mati laser disk menyediakan motor dan gigi; itu majelis yang membalik kepala membaca dari satu sisi disk yang lain. A nice large solar panel allows the bot to run under reasonably bright indoor lighting, and the usual pair of photodiodes are tucked under the solar panel. Sebuah panel surya bagus besar memungkinkan bot untuk berjalan di bawah pencahayaan dalam ruangan cukup terang, dan pasangan biasa foto dioda yang terselip di bawah panel surya. The base is a chunk of steel that held the head magnets on a big old hard disk, and is heavy enough so that the whole thing doesn't fall over. dasar adalah sepotong baja yang memegang kepala magnet pada hard disk yang besar tua, dan cukup berat sehingga semuanya tidak jatuh.
A defunct laser disk player provided the motor and gears; it's the assembly that flips the read head from one side of the disk to the other. Seorang pemain mati laser disk menyediakan motor dan gigi; itu majelis yang membalik kepala membaca dari satu sisi disk yang lain. A nice large solar panel allows the bot to run under reasonably bright indoor lighting, and the usual pair of photodiodes are tucked under the solar panel. Sebuah panel surya bagus besar memungkinkan bot untuk berjalan di bawah pencahayaan dalam ruangan cukup terang, dan pasangan biasa foto dioda yang terselip di bawah panel surya. The base is a chunk of steel that held the head magnets on a big old hard disk, and is heavy enough so that the whole thing doesn't fall over. dasar adalah sepotong baja yang memegang kepala magnet pada hard disk yang besar tua, dan cukup berat sehingga semuanya tidak jatuh. The circuit is the basic power smart head circuit , with a Miller solar engine. Rangkaian ini merupakan dasar sirkuit smart power kepala , dengan mesin surya Miller. Since I was using a separate SE, I could gang two sets of three inverters each to drive the motor. Karena saya masih menggunakan SE terpisah, aku bisa geng dua set masing-masing tiga inverter untuk menggerakkan motor. I actually used a 74HCT240 by mistake (meant to use an HC240), but it seems to work pretty well anyway! Aku benar-benar menggunakan 74HCT240 oleh kesalahan (dimaksudkan untuk menggunakan HC240 an), tetapi tampaknya bekerja dengan baik pula!
{kind=link}
Dual LED Pummer Dual LED Pummer
A pummer is a BEAM robot that absorbs solar energy during the day (by charging up a large capacitor or rechargable battery from a solar panel), and releases it during the night, usually by blinking one or more LEDs. Sebuah pummer adalah robot BALOK yang menyerap energi matahari pada siang hari (dengan pengisian baterai yang kapasitor atau rechargable besar dari sebuah panel surya), dan rilis pada malam hari, biasanya dengan berkedip satu atau lebih LED. Think of it as a robot “plant”. Anggap saja sebagai "tanaman" robot. The trick here is to get a circuit that is energy efficient (so can blink the LEDs for as long as possible once it gets dark), and blinks the LEDs in interesting ways. trik di sini adalah untuk mendapatkan sirkuit yang hemat energi (sehingga dapat berkedip LED selama mungkin setelah hari gelap), dan berkedip LED dengan cara yang menarik.
 This a pummer that I built. Ini pummer yang saya dibangun. It's a dual LED pummer, based on a bicore circuit using a 74HCT240 chip. Ini adalah pummer dual LED, berdasarkan bicore sirkuit menggunakan chip 74HCT240. The circuit is described at the Solarbotics site (see schematic for a similar design that uses recharable batteries in place of the capacitor). Rangkaian ini dijelaskan di Solarbotics situs (lihat skematik untuk desain serupa yang menggunakan baterai recharable di tempat kapasitor).
This a pummer that I built. Ini pummer yang saya dibangun. It's a dual LED pummer, based on a bicore circuit using a 74HCT240 chip. Ini adalah pummer dual LED, berdasarkan bicore sirkuit menggunakan chip 74HCT240. The circuit is described at the Solarbotics site (see schematic for a similar design that uses recharable batteries in place of the capacitor). Rangkaian ini dijelaskan di Solarbotics situs (lihat skematik untuk desain serupa yang menggunakan baterai recharable di tempat kapasitor). {kind=link}
The frame of the pummer consists of three hard drive spacers; two for the base (a thin dark one on top of a larger aluminum one), and one placed vertically. Rangka pummer terdiri dari tiga spacer hard drive, dua untuk dasar (gelap tipis di atas aluminium yang lebih besar satu), dan satu ditempatkan vertikal. Both the HCT240 and the 1F storage capacitor just fit inside their respective rings, which inspired the design. Baik HCT240 dan penyimpanan 1F kapasitor hanya cocok di dalam cincin masing-masing, yang terinspirasi desain.
The LEDs are super-bright blue and green. The LED super terang biru dan hijau. Because these suck up a fair amount of juice, this pummer only runs for about an hour after dark. Karena ini menyedot cukup banyak jus, pummer ini hanya berlangsung selama sekitar satu jam setelah gelap.
Solar Herbie Solar Herbie
The Herbie isn't strictly a BEAM bot, but it follows the BEAM tradition of using ICs for purposes they were never intended for. The Herbie tidak sepenuhnya sebuah BALOK bot, tetapi mengikuti tradisi BALOK menggunakan IC untuk tujuan mereka tidak pernah dimaksudkan untuk. The Herbie circuit is based on the LM386 integrated circuit, which is normally used as an audio amplifier. The sirkuit Herbie didasarkan pada sirkuit terpadu LM386, yang biasanya digunakan sebagai penguat audio. In the Herbie circuit, the chip is used to amplify the difference between the outputs of a couple of photodiodes, giving the bot phototactic behavior. Dalam rangkaian Herbie, chip digunakan untuk memperkuat perbedaan antara output dari beberapa foto dioda, memberikan bot perilaku phototactic.{kind=link}
 Here's my Solar Herbie. Berikut Herbie Solar saya. It's the standard Herbie circuit, with a Miller solar engine . Ini adalah sirkuit Herbie standar, dengan mesin surya Miller . The LM386 is tucked above the blue trim pot (I flattened the pins to make it sit flat). The LM386 ini persis berada di atas pot trim biru (saya rata pin untuk membuatnya duduk datar). The small motors are from laptop CD-ROM drives, and the solar engine is positioned between the motors and the capacitor. Motor kecil dari drive CD-ROM laptop, dan mesin surya diposisikan antara motor dan kapasitor.
Here's my Solar Herbie. Berikut Herbie Solar saya. It's the standard Herbie circuit, with a Miller solar engine . Ini adalah sirkuit Herbie standar, dengan mesin surya Miller . The LM386 is tucked above the blue trim pot (I flattened the pins to make it sit flat). The LM386 ini persis berada di atas pot trim biru (saya rata pin untuk membuatnya duduk datar). The small motors are from laptop CD-ROM drives, and the solar engine is positioned between the motors and the capacitor. Motor kecil dari drive CD-ROM laptop, dan mesin surya diposisikan antara motor dan kapasitor. FLED Photopopper Melarikan diri Photopopper
FLED photopoppers make use of the property of flashing LEDs (FLEDs) that they are photosensitive; they consist of a pair of coupled solar engines with FLEDs as photodetectors. photopoppers melarikan diri memanfaatkan milik flashing LED (FLEDs) bahwa mereka peka cahaya, mereka terdiri dari sepasang ditambah mesin surya dengan FLEDs sebagai photodetectors. I built this photopopper following Ray's FLED Photopopper Tutorial , but I mounted my gang of transistors upside-down so that it looks nicer from the bottom. Saya membangun photopopper ini menyusul Ray melarikan diri Photopopper Tutorial , tapi saya dipasang geng saya transistor terbalik sehingga terlihat lebih baik dari bawah. The results are quite pleasing, and this is quite an active little guy. Hasilnya cukup menyenangkan, dan ini cukup si kecil aktif. He's the first to start popping when the sun hits my robot collection. Dia yang pertama mulai bermunculan ketika matahari hits koleksi robot saya. The only problem is that he's liable to fall onto his arse; either the motors need to be placed further back, or there needs to be more weight towards the front. Satu-satunya masalah adalah bahwa dia bertanggung jawab untuk jatuh ke pantatnya, baik motor harus ditempatkan lebih ke belakang, atau ada perlu berat lebih ke arah depan. Oh, and I'll clean up those motor leads one of these days. Oh, dan aku akan membersihkan motor yang menyebabkan hari-hari ini. Flatbot FLED Photopopper Flatbot melarikan diri Photopopper
This is a standard FLED photopopper made with a Sanyo solar cell, and a couple of motors salvaged from laptop CD-ROM drives (the motors that move the head back and forth across the disk surface). Ini adalah standar photopopper melarikan diri dibuat dengan sel surya Sanyo, dan beberapa motor diselamatkan dari drive CD-ROM laptop (motor yang menggerakkan kepala bolak-balik melintasi permukaan disk).
 The challenge here was to to fit everything neatly under the solar panel. Tantangan di sini adalah segala sesuatu agar sesuai dengan rapi di bawah panel surya. This bot is quite active in sunlight, but doesn't seem to be very phototropic. Bot ini cukup aktif dalam sinar matahari, tetapi tidak terlihat sangat phototropic.
The challenge here was to to fit everything neatly under the solar panel. Tantangan di sini adalah segala sesuatu agar sesuai dengan rapi di bawah panel surya. This bot is quite active in sunlight, but doesn't seem to be very phototropic. Bot ini cukup aktif dalam sinar matahari, tetapi tidak terlihat sangat phototropic. Dual Solar Panel Head Kepala Dual Solar Panel
The solar photopopper replaced the two photodiodes of the bare bones photovore circuit with the solar panels, by taking a reference voltage from their mid-point. The photopopper surya menggantikan dua dioda dari rangkaian tulang photovore telanjang dengan panel surya, dengan mengambil tegangan referensi dari titik-pertengahan. This technique was simple to apply to the bare bones head circuit too (with the modification suggested by Wilf Rigter here ). Teknik ini sederhana untuk diterapkan pada sirkuit kepala telanjang tulang juga (dengan modifikasi yang disarankan oleh Wilf Rigter di sini ).{kind=link}
The result is a dual solar panel head, with no additional photodetectors. Hasilnya adalah kepala dual panel surya, tanpa photodetectors tambahan.

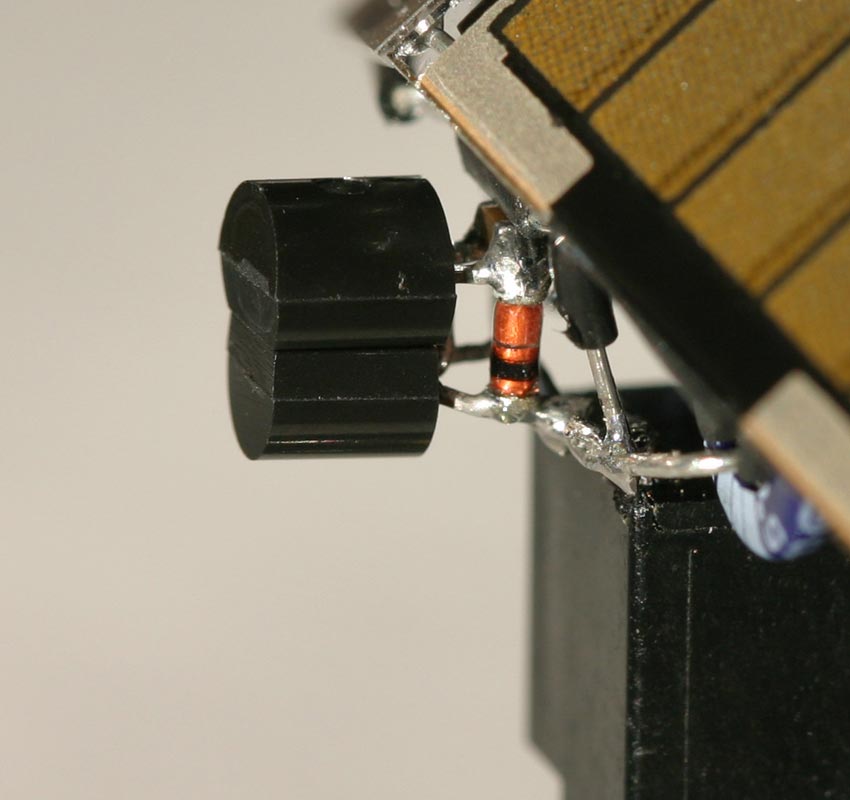 Like my bare bones head , this robot uses an Omron floppy drive eject motor, with a base made from hard drive spindle motor parts. Seperti saya tulang kepala telanjang , robot ini menggunakan motor penggerak floppy eject Omron, dengan basis yang terbuat dari motor spindle hard drive bagian. The circuit is switched by a Miller Solar Engine , and there are two 3300µF storage capacitors under the solar panels. Rangkaian diaktifkan oleh Miller Solar Engine , dan ada dua 3300μF kapasitor penyimpanan di bawah panel surya. I used some salvaged surface mount components for the solar engine capacitor and diode, which make the SE nice and small, as shown in the second photograph. Saya menggunakan beberapa permukaan diselamatkan mount komponen untuk mesin surya kapasitor dan dioda, yang membuat SE bagus dan kecil, seperti terlihat pada foto kedua. The chip is a 74AC240. Chip adalah suatu 74AC240. A schematic is available . Skema yang tersedia .
Like my bare bones head , this robot uses an Omron floppy drive eject motor, with a base made from hard drive spindle motor parts. Seperti saya tulang kepala telanjang , robot ini menggunakan motor penggerak floppy eject Omron, dengan basis yang terbuat dari motor spindle hard drive bagian. The circuit is switched by a Miller Solar Engine , and there are two 3300µF storage capacitors under the solar panels. Rangkaian diaktifkan oleh Miller Solar Engine , dan ada dua 3300μF kapasitor penyimpanan di bawah panel surya. I used some salvaged surface mount components for the solar engine capacitor and diode, which make the SE nice and small, as shown in the second photograph. Saya menggunakan beberapa permukaan diselamatkan mount komponen untuk mesin surya kapasitor dan dioda, yang membuat SE bagus dan kecil, seperti terlihat pada foto kedua. The chip is a 74AC240. Chip adalah suatu 74AC240. A schematic is available . Skema yang tersedia . {kind=link}
Bare bones photo head Bare foto tulang kepala
A BEAM “head” robot is a robot that can “look around” for the brightest source of light. Sebuah BEAM "kepala" robot adalah sebuah robot yang bisa "melihat-lihat" untuk sumber cahaya terang. This usually means mounting everthing on top of a gear motor, and then fixing the spindle of the motor to the base. Hal ini biasanya berarti pemasangan everthing di atas motor roda gigi, dan kemudian memperbaiki spindel dari motor ke dasar. This is a bare-bones photo head which uses a 74AC240 IC, and two photodiodes as light detectors. Ini adalah foto kepala telanjang-tulang yang menggunakan IC 74AC240, dan dua dioda sebagai detektor cahaya. It's based on this schematic , which uses a Miller solar engine . Ini didasarkan pada skema ini , yang menggunakan mesin surya Miller . You can see the free-formed solar engine overhanging the front of the capacitor; the IC is hidden under the solar panel. Anda dapat melihat mesin surya bebas terbentuk menggantung bagian depan kapasitor, IC yang tersembunyi di bawah panel surya.
This is a bare-bones photo head which uses a 74AC240 IC, and two photodiodes as light detectors. Ini adalah foto kepala telanjang-tulang yang menggunakan IC 74AC240, dan dua dioda sebagai detektor cahaya. It's based on this schematic , which uses a Miller solar engine . Ini didasarkan pada skema ini , yang menggunakan mesin surya Miller . You can see the free-formed solar engine overhanging the front of the capacitor; the IC is hidden under the solar panel. Anda dapat melihat mesin surya bebas terbentuk menggantung bagian depan kapasitor, IC yang tersembunyi di bawah panel surya. The motor is an Omron gear motor obtained from a Mac floppy drive (it's the motor that gives the Mac floppy drives their distinguishing feature—software eject). Motor adalah gigi Omron motor yang diperoleh dari Mac drive floppy (itu motor yang memberikan floppy drive Mac membedakan mereka mengeluarkan fitur-perangkat lunak). The base is made from parts of a hard drive motor. dasar ini terbuat dari bagian-bagian motor hard drive.
This little guy chatters every second or so in the sun. Ini si kecil chatters setiap detik atau lebih di bawah sinar matahari. It was my first well-functioning head, and I like the way it turned out. Ini pertama kali kepala saya berfungsi dengan baik, dan saya suka cara ternyata.
BEAMAnt BEAMAnt
The BEAMAnt is a phototactic bot which has potentially complex behavior depending on the light level. The BEAMAnt adalah phototactic bot yang kompleks perilaku berpotensi tergantung pada tingkat cahaya. It has two photodiodes for light sensing, and two antennae which switch the motors into reverse when they touch something. Ini memiliki dua dioda cahaya sensing, dan dua antena yang bertukar motor mundur ketika mereka menyentuh sesuatu.The core of the BEAMAnt is a 74AC240 chip wired as two coupled bicores . Inti dari BEAMAnt adalah sebuah chip 74AC240 kabel sebagai dua digabungkan bicores . The first “photo” bicore oscillates at a frequency and symmetry determined by the light falling on the photodiodes—slow in low light, and faster in bright light. Yang pertama "foto" bicore berosilasi pada frekuensi dan simetri ditentukan oleh cahaya yang jatuh pada dioda-lambat dalam cahaya rendah, dan lebih cepat dalam cahaya terang. The second “motor” bicore generates a basic left/right oscillation that is used to alternate the motors. Yang kedua "motor" bicore menghasilkan kiri dasar / osilasi kanan yang digunakan untuk alternatif motor. The two bicores are coupled by resistors, which can lead to complex interactions between them. Kedua bicores yang digabungkan oleh resistor, yang dapat mengakibatkan interaksi yang kompleks antara mereka. The circuit has two tactile sensors, which temporarily reverse the polarity of the motor on the other side. Rangkaian ini memiliki dua sensor sentuhan, yang sementara membalikkan polaritas motor di sisi lain. This allows the bot to turn away from obstacles. Hal ini memungkinkan bot untuk berpaling dari rintangan.
 This BEAMAnt is based on two small gear motors ( Solarbotics GM15 ) on a bent paperclip frame. BEAMAnt ini didasarkan pada dua motor roda gigi kecil ( Solarbotics GM15 ) pada bingkai penjepit kertas bengkok. I solarized the circuit with a Miller solar engine, which you can see hanging off the back in the “under the hood” shot below. Aku solarized rangkaian dengan mesin Miller surya, yang dapat Anda lihat tergantung dari belakang dalam "di bawah tenda" ditembak di bawah ini. Most of the circuit is free-formed around the '240 IC; the two photodiodes sit underneath the front corners of the solar cell, and the 0.047F capacitor acts as a nose. Sebagian besar rangkaian bebas-terbentuk di sekitar IC '240, dua dioda duduk di bawah sudut depan sel surya, dan tindakan kapasitor 0.047F sebagai hidung.
This BEAMAnt is based on two small gear motors ( Solarbotics GM15 ) on a bent paperclip frame. BEAMAnt ini didasarkan pada dua motor roda gigi kecil ( Solarbotics GM15 ) pada bingkai penjepit kertas bengkok. I solarized the circuit with a Miller solar engine, which you can see hanging off the back in the “under the hood” shot below. Aku solarized rangkaian dengan mesin Miller surya, yang dapat Anda lihat tergantung dari belakang dalam "di bawah tenda" ditembak di bawah ini. Most of the circuit is free-formed around the '240 IC; the two photodiodes sit underneath the front corners of the solar cell, and the 0.047F capacitor acts as a nose. Sebagian besar rangkaian bebas-terbentuk di sekitar IC '240, dua dioda duduk di bawah sudut depan sel surya, dan tindakan kapasitor 0.047F sebagai hidung.  Initially, the bot just scooted forward on a skid made from the bent paperclip. Awalnya, bot hanya berlari maju pada skid terbuat dari penjepit kertas bengkok. However, on anything other than a very smooth surface, the bot wasn't able to turn around. Namun, pada apa pun selain permukaan yang sangat halus, bot tidak bisa berbalik. I solved this by hot-glueing a small bearing from a floppy drive stepper motor over the skid. Aku memecahkan ini dengan panas-pengeleman sebuah bantalan kecil dari motor stepper floppy drive atas selip itu.
Initially, the bot just scooted forward on a skid made from the bent paperclip. Awalnya, bot hanya berlari maju pada skid terbuat dari penjepit kertas bengkok. However, on anything other than a very smooth surface, the bot wasn't able to turn around. Namun, pada apa pun selain permukaan yang sangat halus, bot tidak bisa berbalik. I solved this by hot-glueing a small bearing from a floppy drive stepper motor over the skid. Aku memecahkan ini dengan panas-pengeleman sebuah bantalan kecil dari motor stepper floppy drive atas selip itu. This bot has impressive phototactic abilities. Bot ini memiliki kemampuan phototactic mengesankan. If the light source is off to the side, it will turn on its axis until it's facing the light, and then head straight towards it. Jika sumber cahaya ke samping, itu akan menyala pada porosnya sampai menghadap cahaya, dan kemudian langsung menuju ke arah itu. Obstacle avoidance could use a bit of tuning; the sensor timers capacitors don't work very well in a solar-driven bot, because the power keeps dropping away. penghindaran Kendala bisa menggunakan sedikit tuning; timer sensor kapasitor tidak bekerja sangat baik dalam sebuah-surya didorong bot, karena kekuasaan terus menjatuhkan diri.
Egg Pummer Telur Pummer
This is a dual LED pummer built using the standard 74AC240 pummer circuit . Ini adalah pummer dual LED dibangun menggunakan standar sirkuit pummer 74AC240 . The electronics are tucked inside part of a hard drive spindle motor (from a big old hard drive), with the two LEDs illuminating the base of a glass egg. Para elektronik diselipkan di dalam bagian dari motor spindle hard drive (dari hard drive besar tua), dengan dua LED menerangi dasar telur kaca.

Free Template Blogger collection template Hot Deals SEO
Langganan:
Komentar (Atom)
About Me

- cinta_tisinta
- aku bukanlah siapa-aiapa,aku hanyalah hamba yang ingin menggapai mimpi